Proceedings
Featured Presentations
What’s New in MATLAB and Simulink R2021a
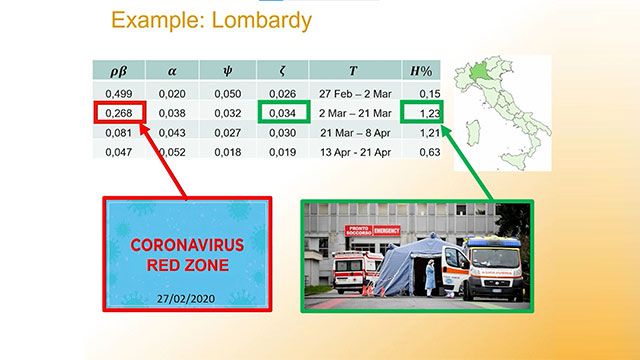
Controlling the COVID-19 Epidemic in Italy Using a Network Model
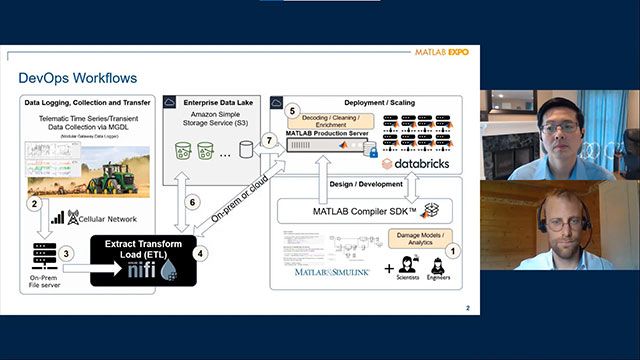
DevOps for Software and Systems: Putting Algorithms and Models in Operation
Toon Weyens, MathWorks
Plenary Sessions
Scientists and Engineers Save the World

Electrification in the Aerospace Industry
What's New in MATLAB and Simulink R2021a
Building Knowledge in An Interdisciplinary world
The Interactions Between Natural and Artificial Intelligence

5G and Radar
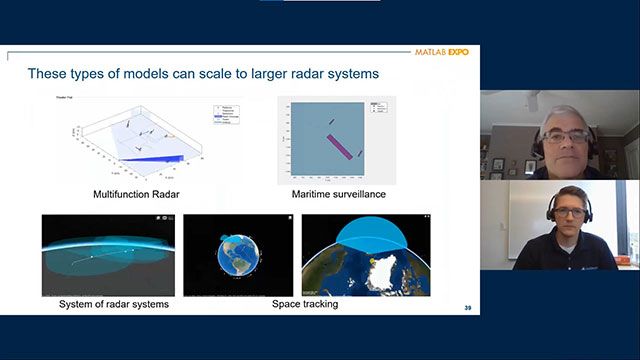

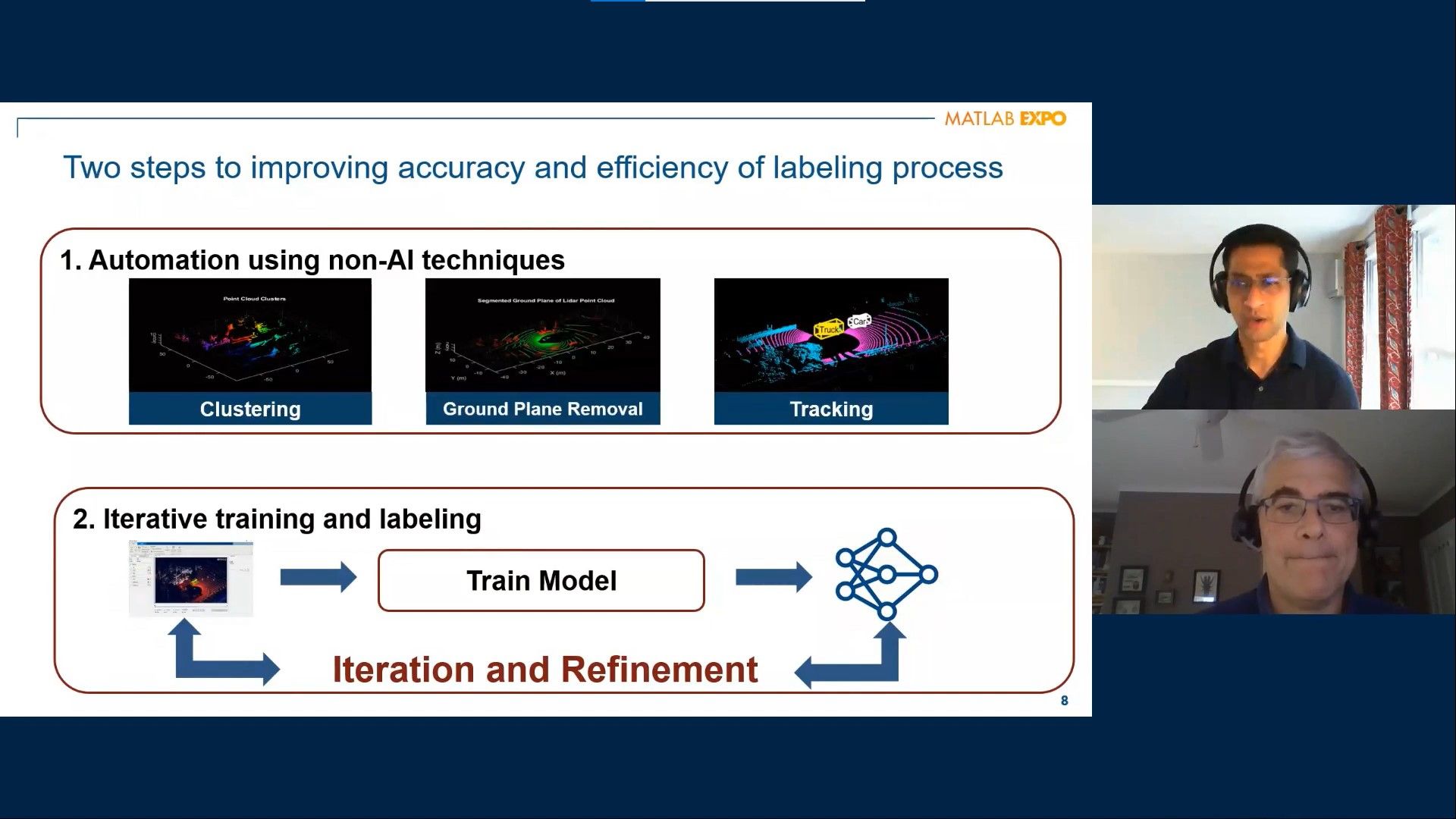
Applying AI to Radar and Lidar Processing
Rick Gentile, MathWorks
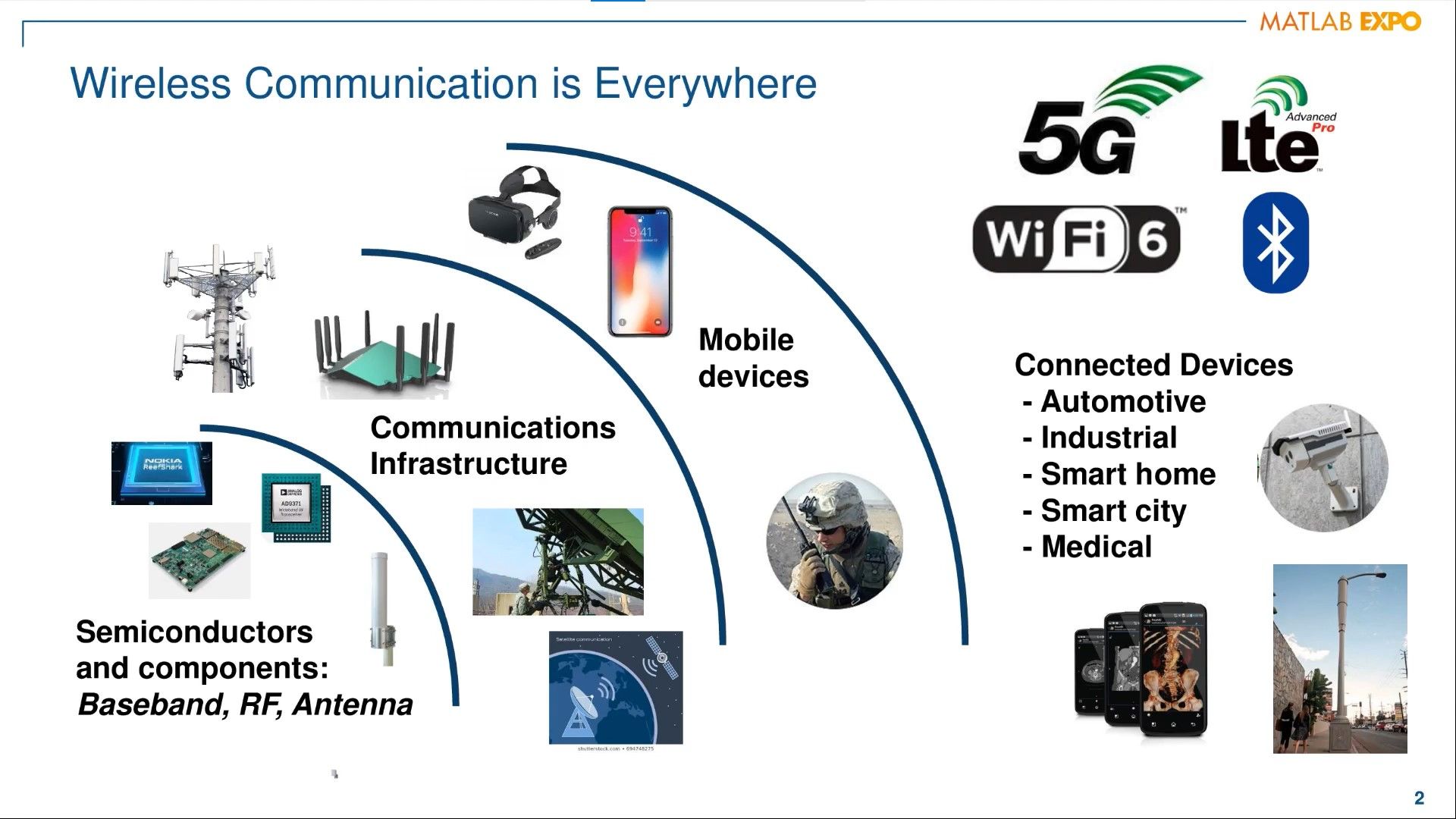
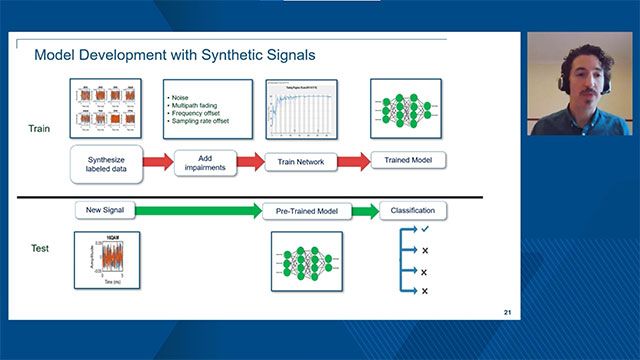
5G and Wireless Design with MATLAB
Houman Zarrinkoub, MathWorks
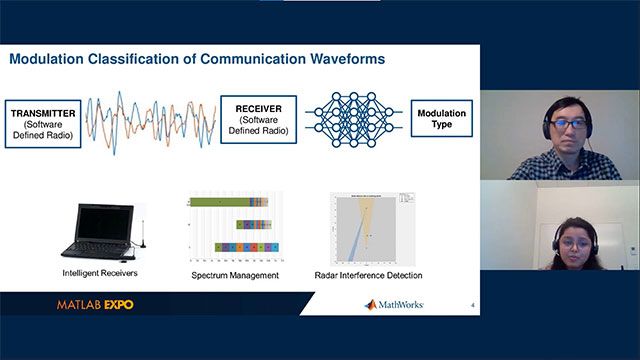
SDR Solutions with NI Hardware and MathWorks Software
Mike McLernon, MathWorks
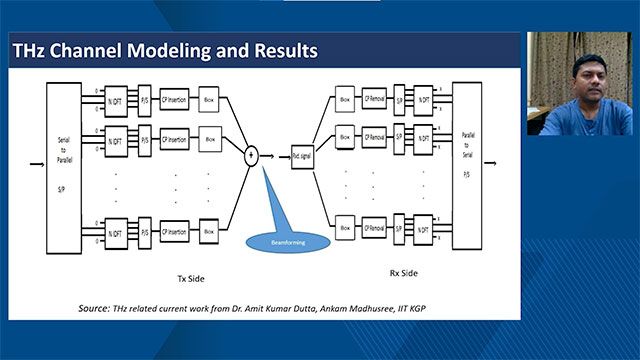
A Low Cost 5G Testbed Development for Futuristic 6G Cellular Standard
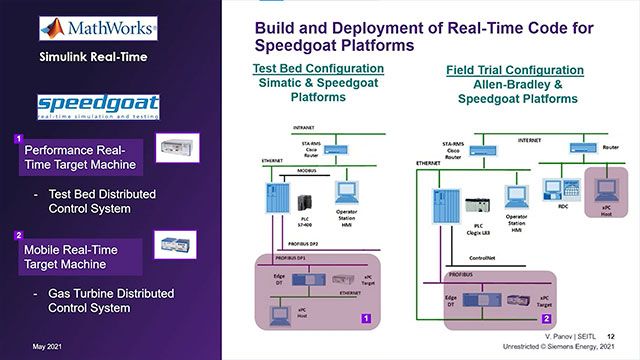
Motor and Power Control
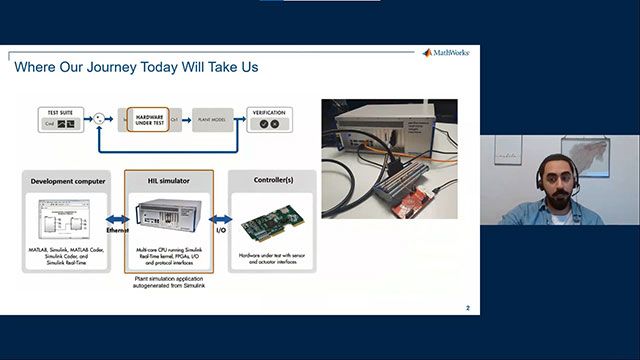
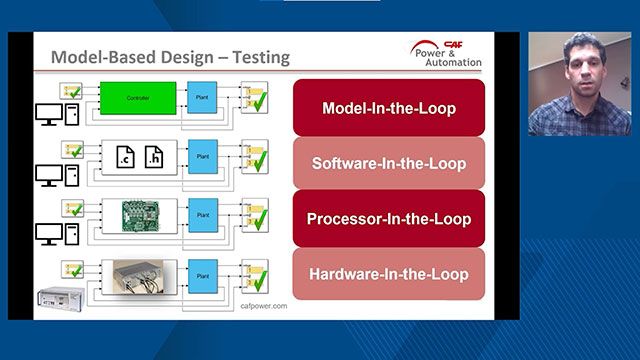
Hardware-in-the-Loop Testing of Control Algorithms for Modular Multi-Level Converters
Graham Dudgeon, MathWorks
Manuel Fedou, Speedgoat
AI in Engineering
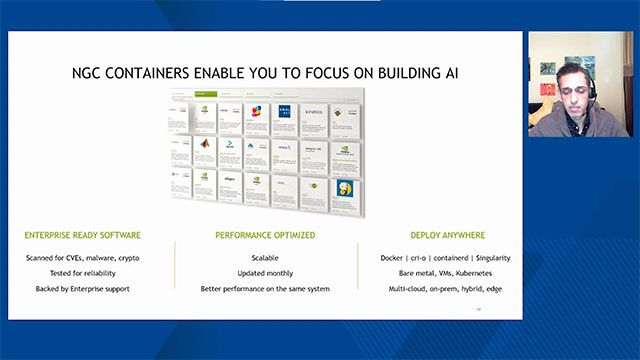
Accelerating AI and Deep Learning Workflows with MATLAB and NGC
Andy Thé, MathWorks
AI for Medical Device Design and Digital Health Applications
Louvere Walker-Hannon, MathWorks

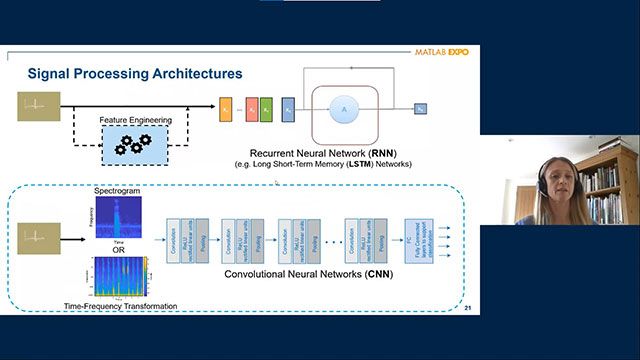
Predictive Maintenance Using Deep Learning
Rachel Johnson, MathWorks
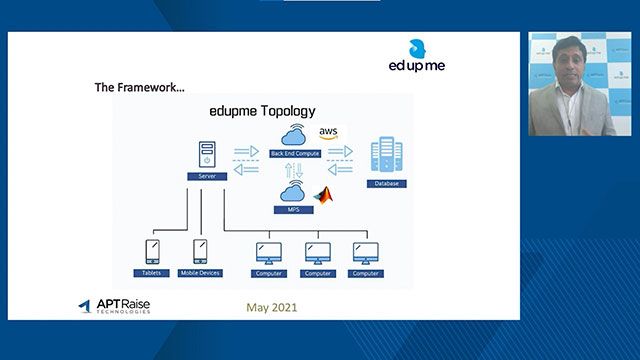
Artificial Intelligence and Real Time Adaptive Knowledge Delivery Using MATLAB

Deploying Artificial Intelligence on PLCs
Rares Curatu, MathWorks

Deploying AI to Embedded and Enterprise Systems
Greg Coppenrath, MathWorks

Snow Hazard Index Using Conditional GAN and Semantic Segmentation
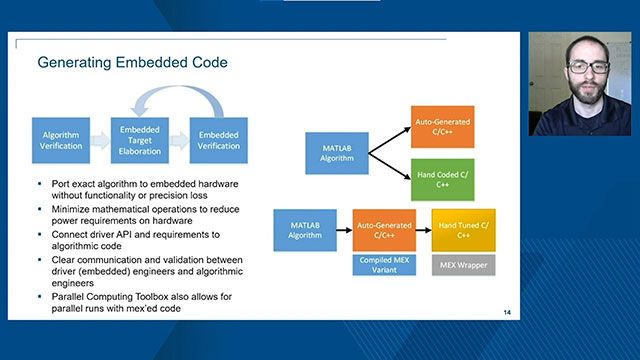
Algorithm Development and Deployment
Heather Gorr, MathWorks
David Garrison, MathWorks
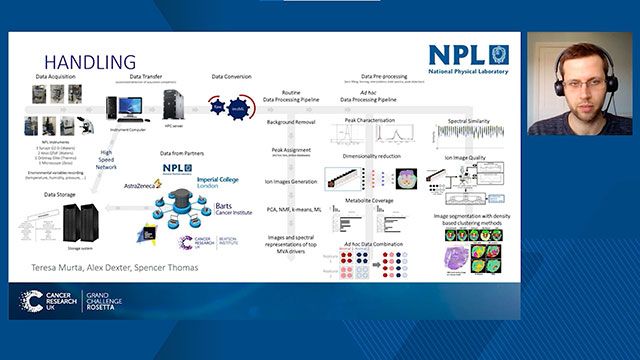
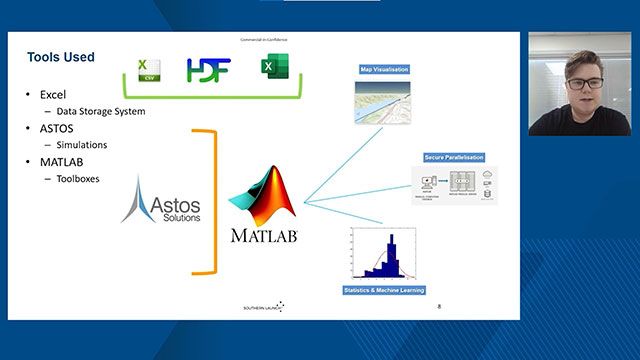
Handling, Analysis, and Storage of Big Data for Healthcare

Meeting the Challenges of Design Optimization
Sohini Sarkar, MathWorks
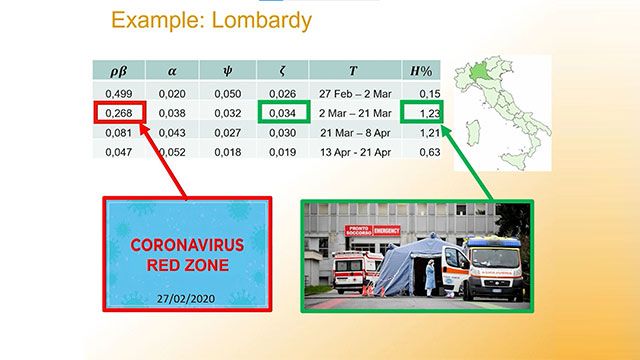
Controlling the COVID-19 Epidemic in Italy Using a Network Model
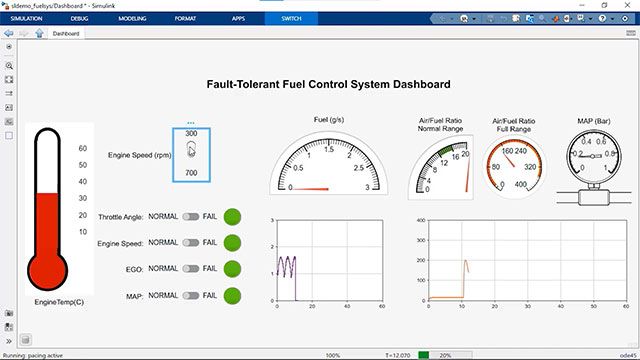
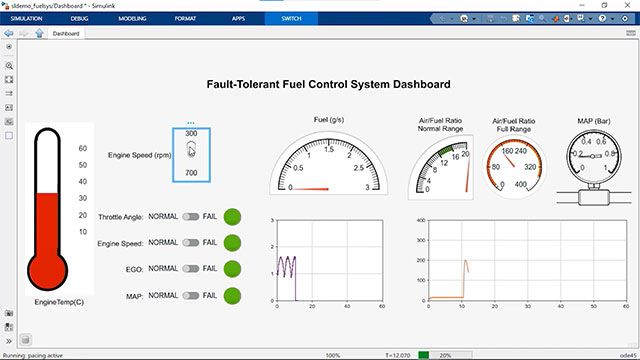
Sharing MATLAB Apps and Simulink Simulations
Autonomous Systems
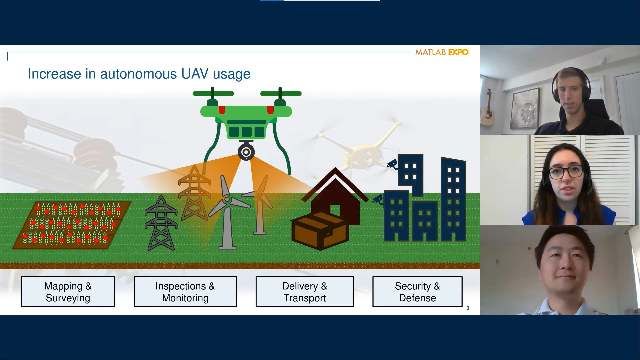
Autonomous Unmanned Aerial Vehicles (UAV) Development and Evaluation with MATLAB and Simulink
Andrew Grabowski, MathWorks
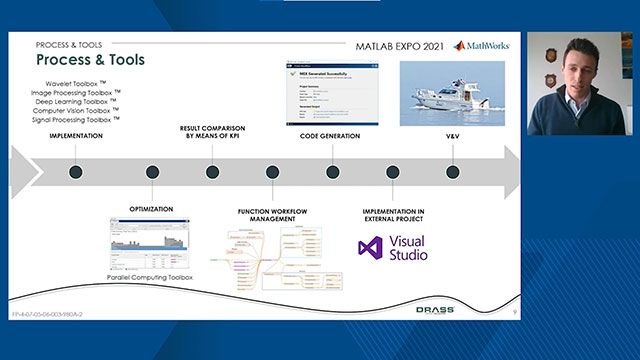
Smart Maritime Surveillance System
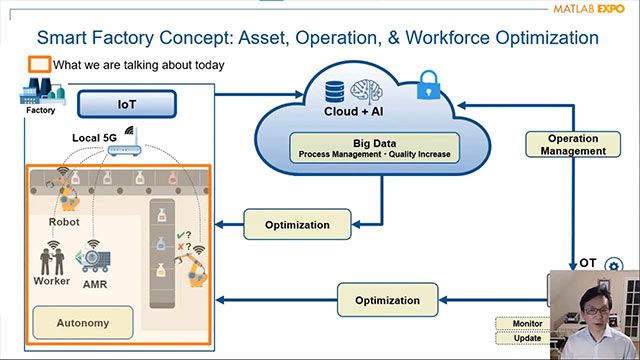
Smart Factory: Autonomous Industrial Robots from Perception to Motion
Ronal George, MathWorks
FPGA, ASIC, and SoC Design
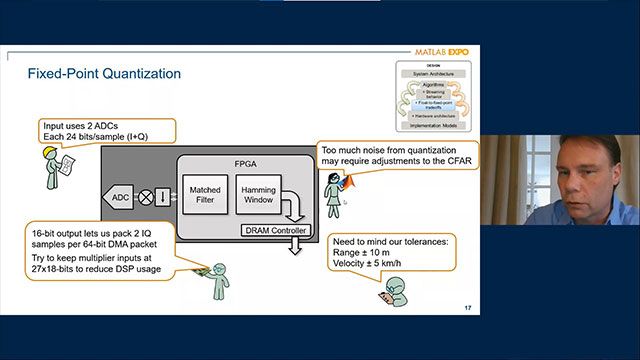
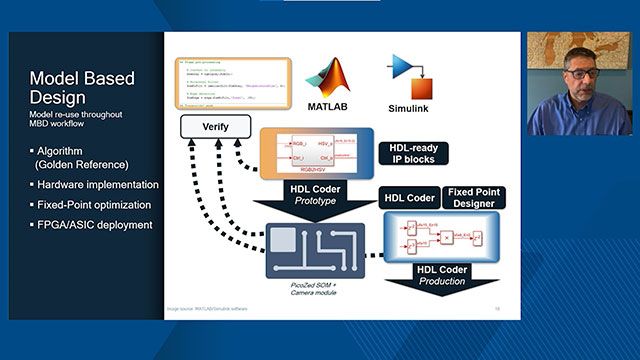
Hardware Agnostic Model-Based Design Workflow for Rapid Prototyping of Image Processing Applications
Steve Kuznicki, MathWorks
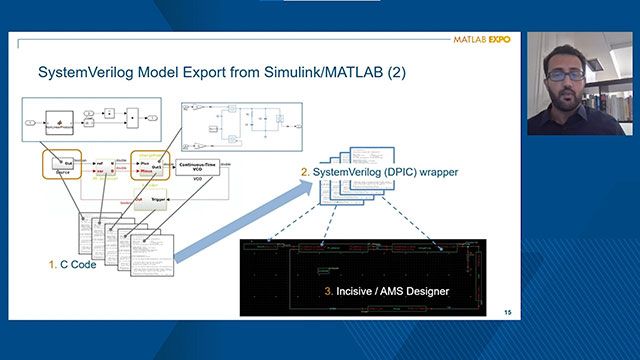
Accelerating Design, Data Visualization, and Analysis of Analog and Mixed-Signal Systems
Jesson John, MathWorks
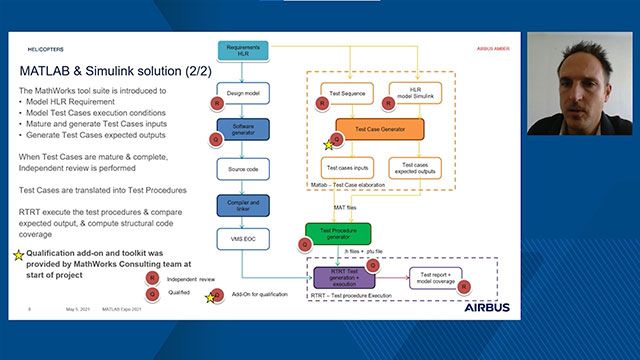
Implementation, Verification, and DevOps
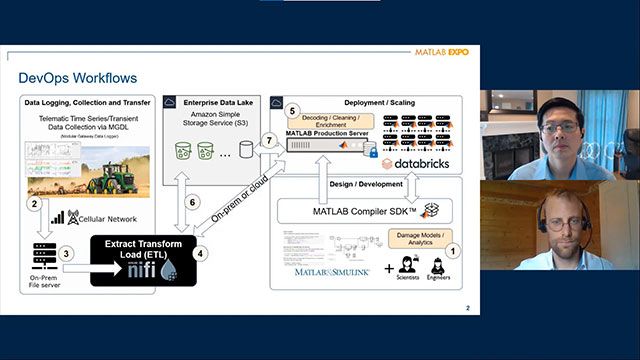
DevOps for Software and Systems: Putting Algorithms and Models in Operation
Toon Weyens, MathWorks

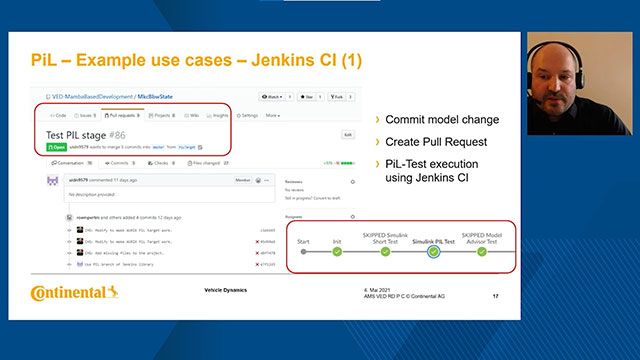
Continuous Integration with MATLAB and Simulink
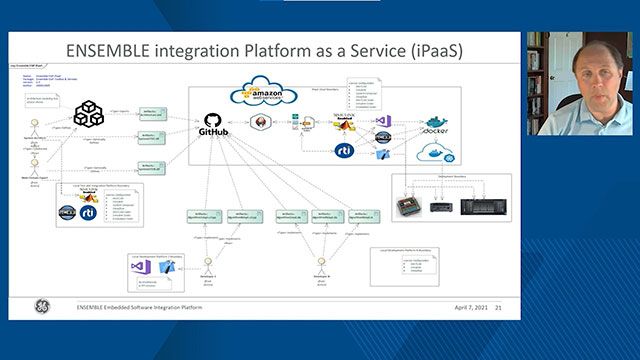
Ensemble Embedded Software Integration Platform

Developing Embedded Software with Model Based Design
Jeff Harper, MathWorks
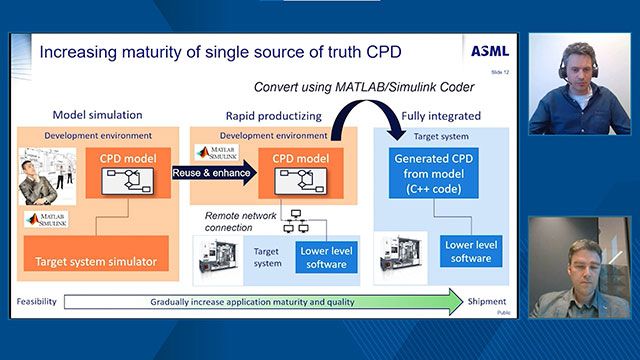
Model-Driven Production Software Development for Calibration at ASML
Wouter van Heijningen, ASML
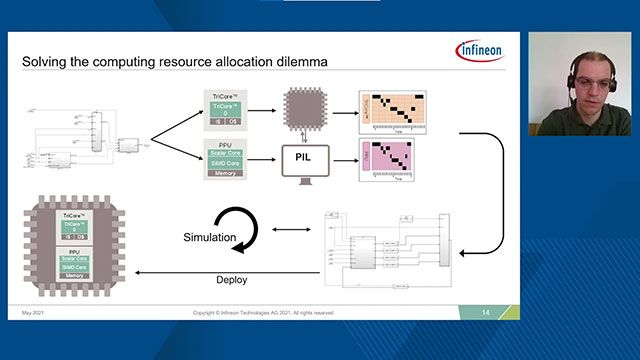
Model-Based Design for Next Generation AURIX Automotive Microcontroller
Continuous Modeling with MATLAB and Microsoft Azure DevOps
MathWorks Automotive Conference
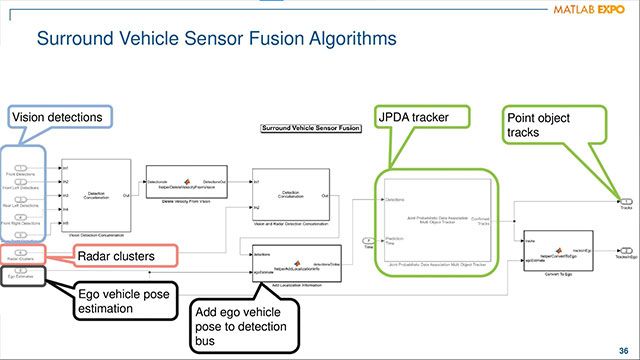
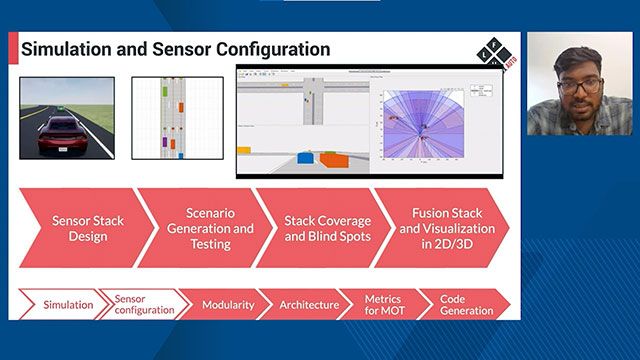
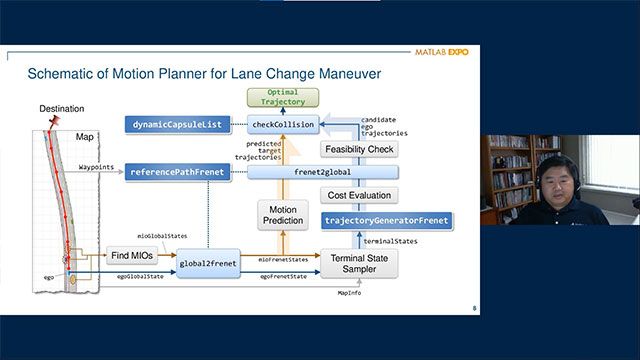
Development of Novel Sensor Fusion Architectures for Autonomous Vehicles
Rajkumar Palanisamy, Flux Auto
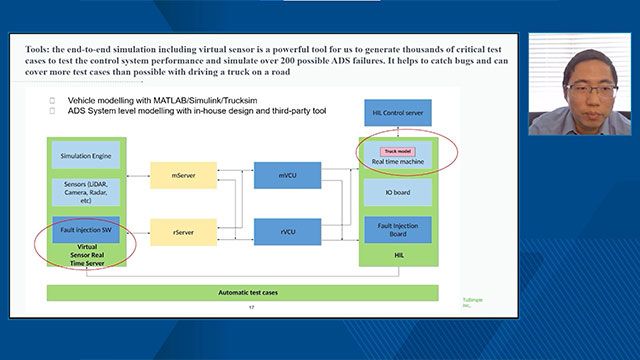

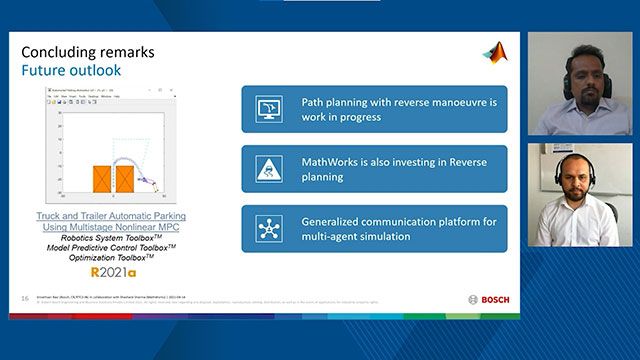
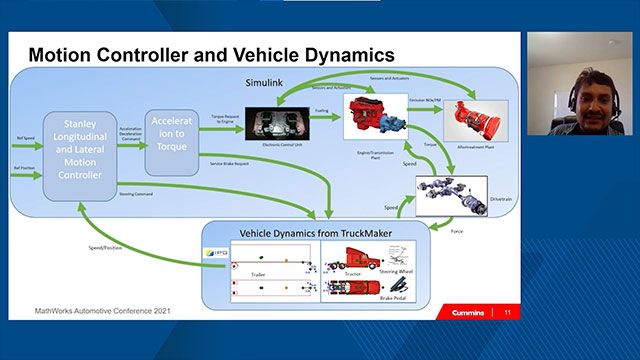
Simulation Framework for Highly Autonomous Trucks in a Logistics Centre
Shashank Sharma, MathWorks
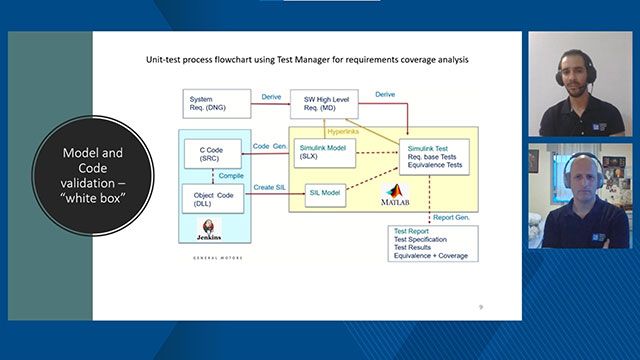
Low Velocity Maneuvering Development with the MathWorks Toolchain
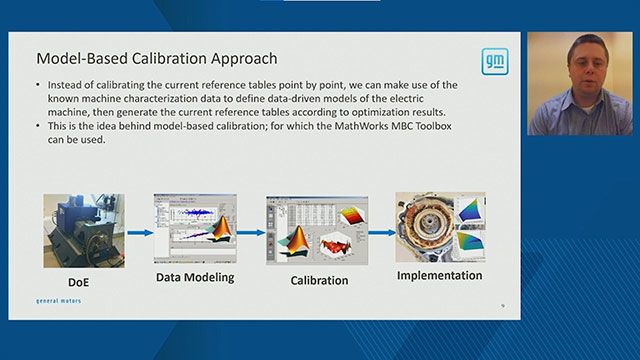
Alon Davidi, General Motors
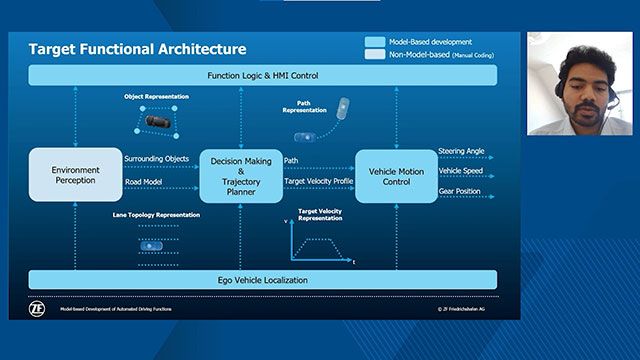
Low-Speed Vehicle Motion Control Algorithms for Automated Driving Functions
Dr.-Ing. Marco Wegener, ZF
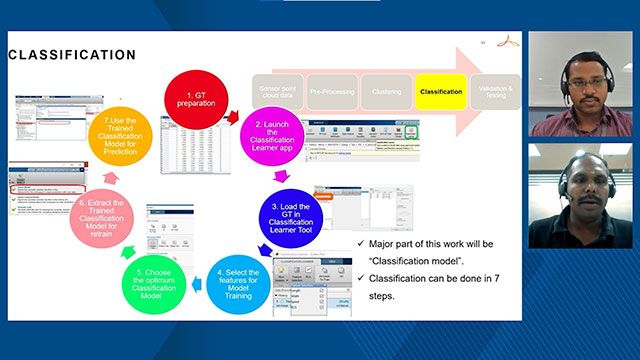
Target Detection and Classification in Radar Point Cloud with MathWorks
Suresh S, Renault Nissan
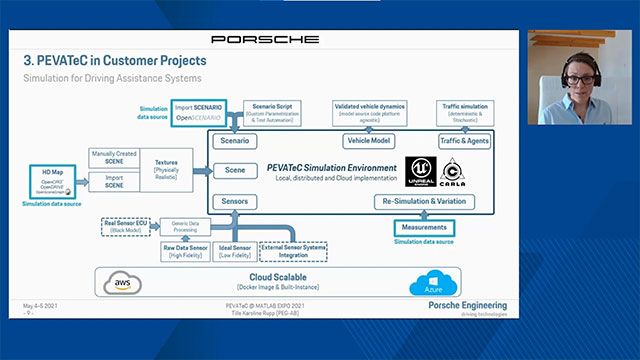
ADAS AD Virtual Platform for End to End Software Development and Testing
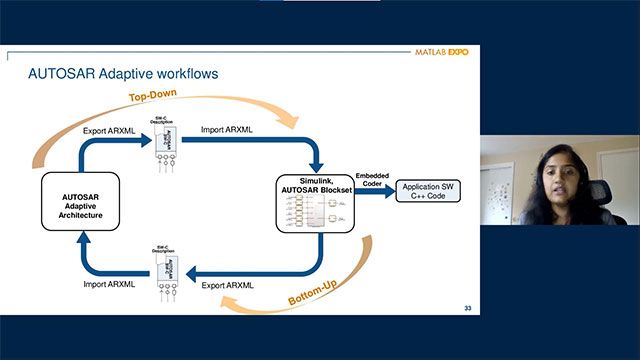
Designing and Deploying Service-Oriented Architectures (SOA) with Simulink
Shwetha Bhadravathi Patil, MathWorks

Developing a Driver Monitoring System Using Model-Based Design

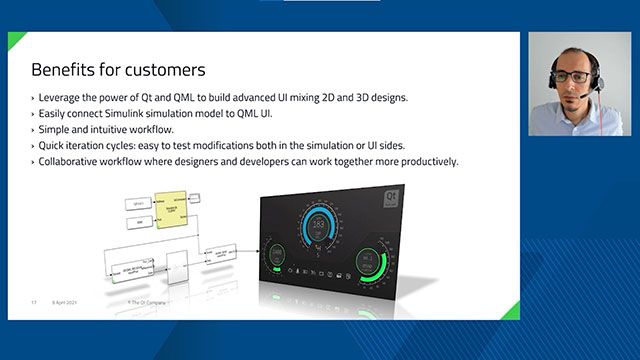
Design the Next-Gen User Experience with Simulink and Qt Design Studio
Miao Luo, The Qt Company
High Fidelity Motor Modeling for HIL with FPGAs
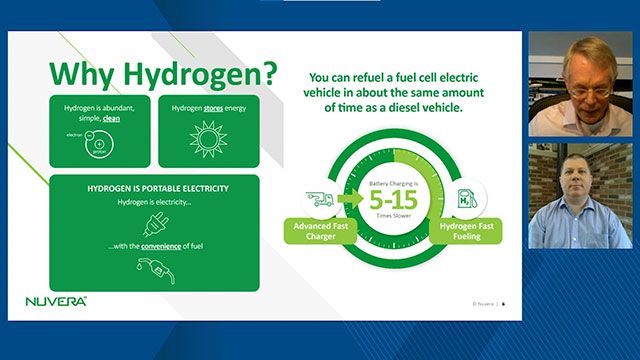
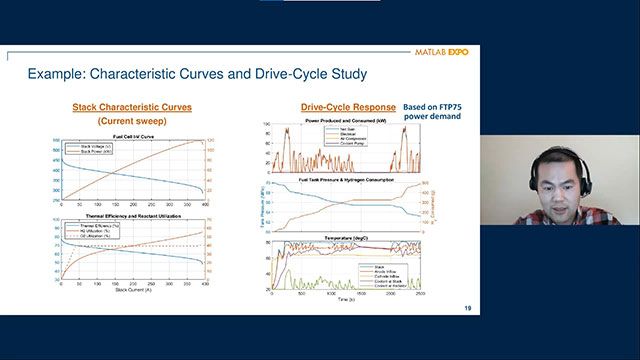
Hydrogen Is the New Diesel: Electrifying Heavy-Duty Vehicles with Nuvera Fuel Cells
Pierre-Francois Quet, Nuvera
PIL-Target Introduction for Infineon AURIX TC377
Modeling and Simulation
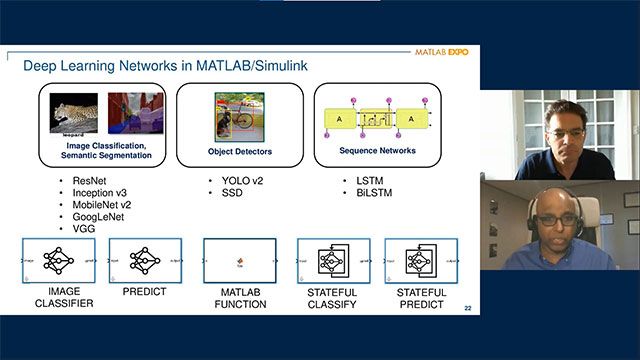
Integrating AI into Model-Based Design
Bill Chou, MathWorks
Bernhard Suhm, MathWorks
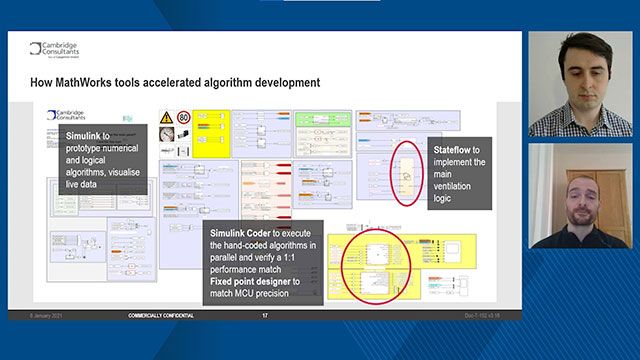
Accelerating Emergency Ventilator Development
Max Curzi, Cambridge Consultants
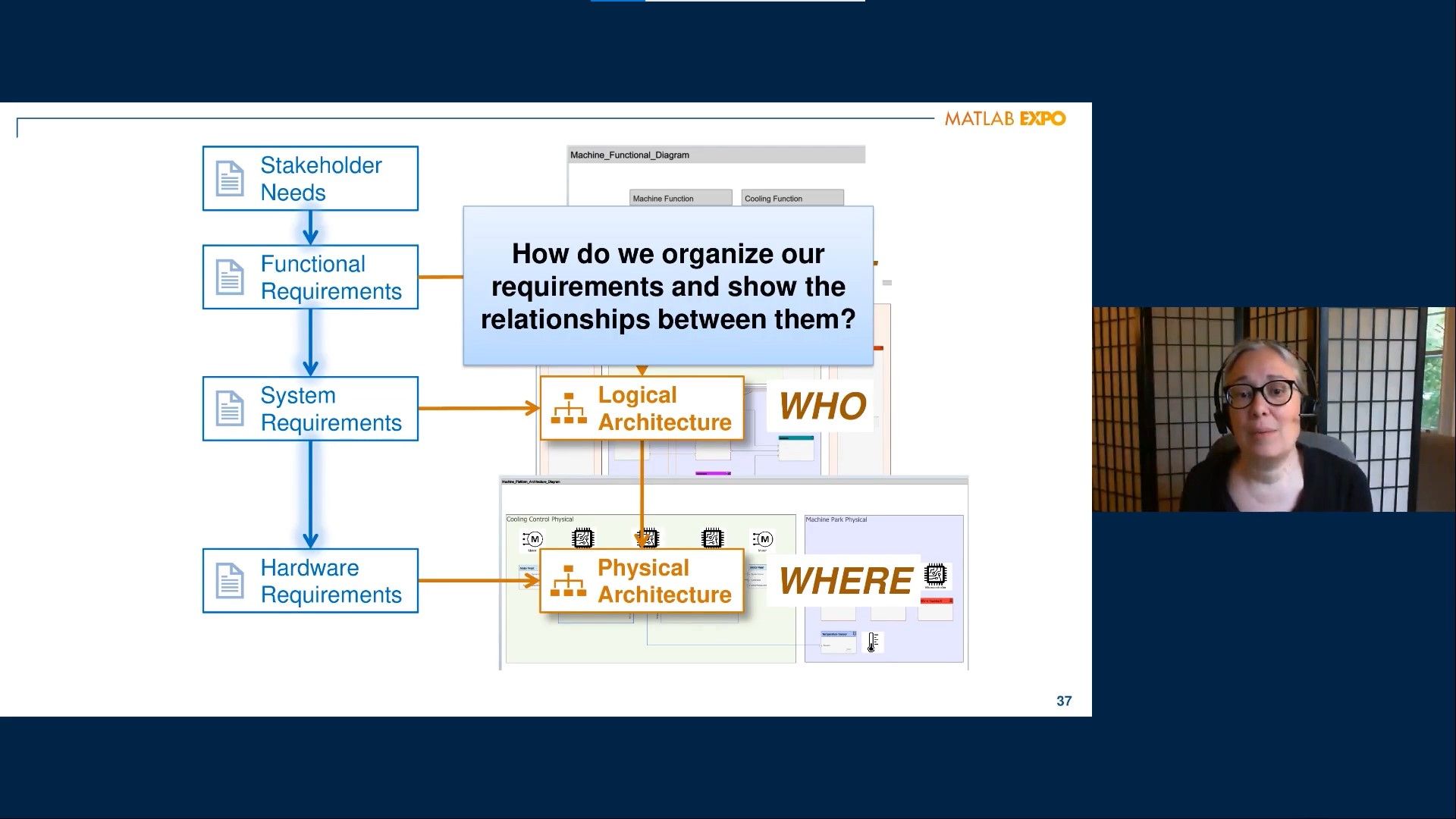
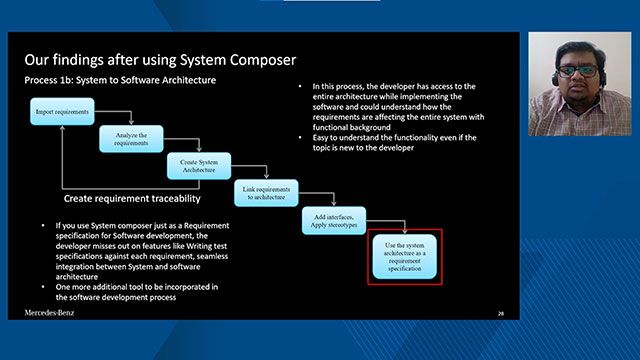
System Architecture Creation Using System Composer
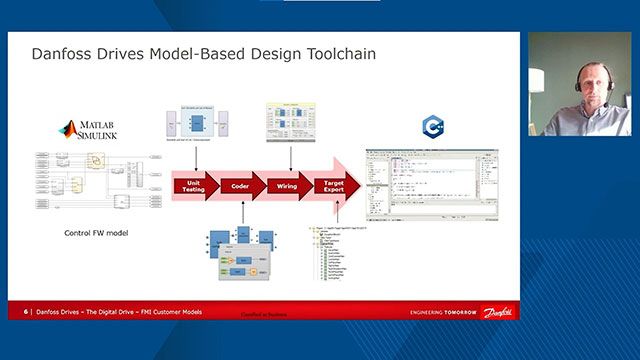
The Digital Drive – FMI Customer Models
Teaching with MATLAB and Simulink
Advancing Engineering Education with Virtual Labs
Magnus Egerstedt, Georgia Institute of Technology
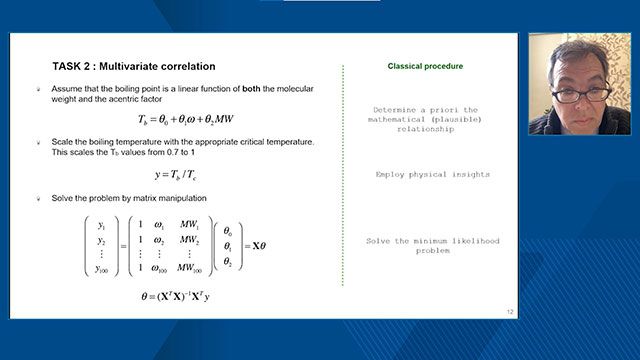
Employing Machine Learning to Correlate Fluid Properties
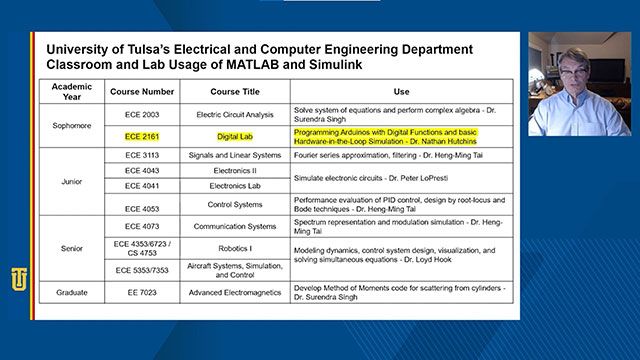
Teaching Electric Power Systems with MATLAB and Simulink
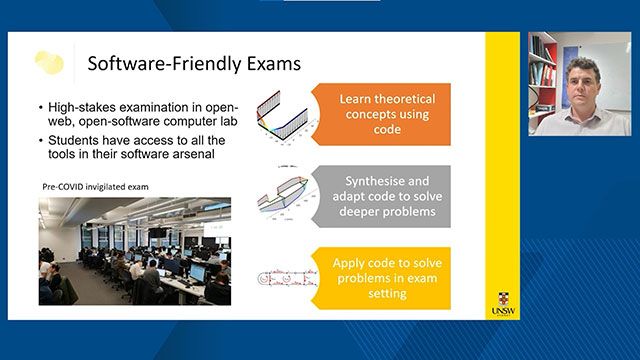
Authentic Engineering Assessment: From Quizzes to High-Stakes Examination
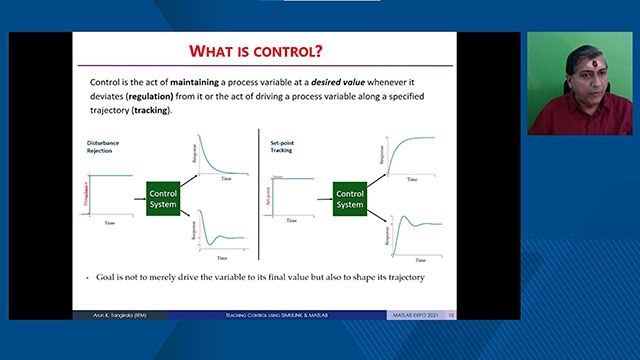
Integrated Classroom Teaching of Control Using MATLAB and Simulink
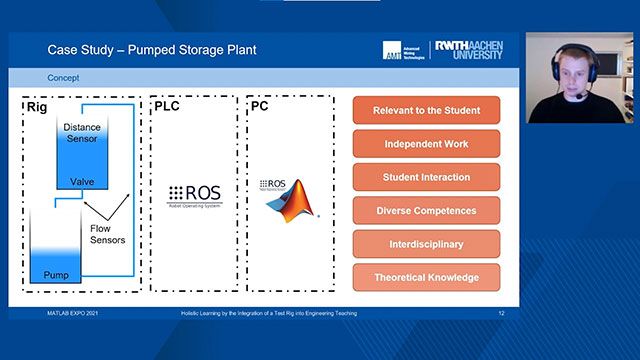
Holistic Learning by the Integration of a Test Rig into Engineering Teaching
Sebastian Graszk, RWTH Aachen University
Hands-On Workshops
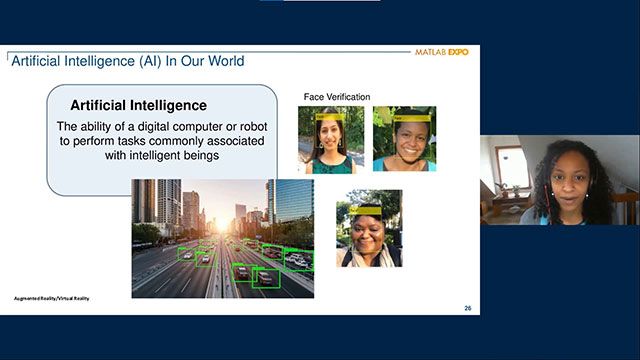
Exploring Challenges with Artificial Intelligence and Augmented Reality
Sarah Mohamed, MathWorks
Shruti Karulkai, MathWorks
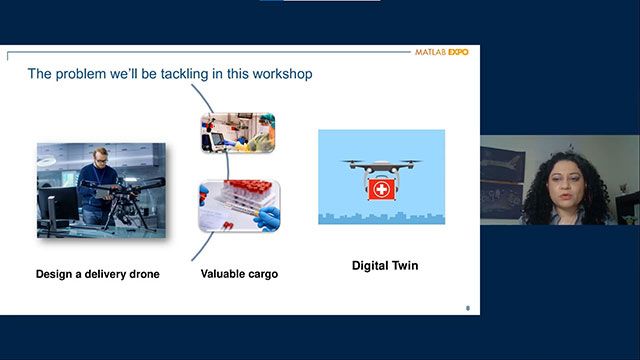
Mission Planning of a Quadcopter using a Digital Twin
Sara Nambi, MathWorks
Modeling and Solving Optimization Problems
Sohini Sarkar, MathWorks
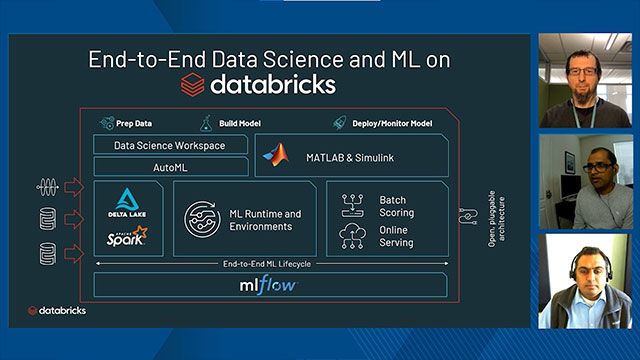
Cloud and IoT

AI in the Cloud Workflows with MATLAB
Kishen Mahadevan, MathWorks
Digital Twins for Embedded, Edge, and Cloud Platforms
Cloud Data Workflows for Scientists and Engineers: What You Should Know
Igor Alekseev, Amazon Web Services (AWS)
Arvind Hosagrahara, MathWorks
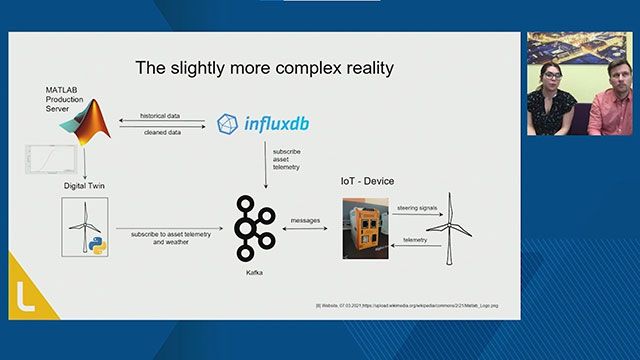
Energy Asset Health Monitoring on a Data Science and IIoT Platform
Emma Haley, Leipziger Stadtwerke GmbH