Proceedings
Featured Presentations
What’s New in MATLAB and Simulink R2022a
Michael Carone, MathWorks



Advancing AI and Data Science Through Industry/Academia Collaboration
Plenary
What’s New in MATLAB and Simulink R2022a
Michael Carone, MathWorks


Rolls-Royce Pathway to Net Zero


Advancing AI and Data Science Through Industry/Academia Collaboration
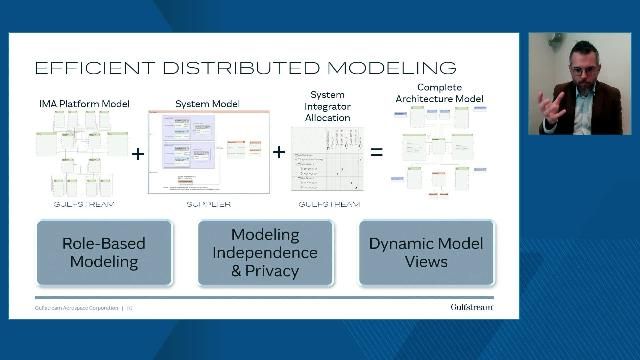
The Electronic System Architecture Modeling (eSAM) Method

How Is Shell Driving Its AI Future?
Amjad Chaudry, Shell International Ltd.
5G, Wireless, and Radar
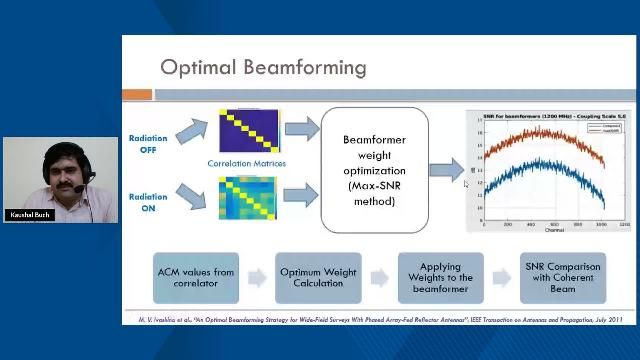
System-level Simulation of an Aperture Array Beamformer
Sreekar Sai Ranganathan, Indian Institute of Technology Madras
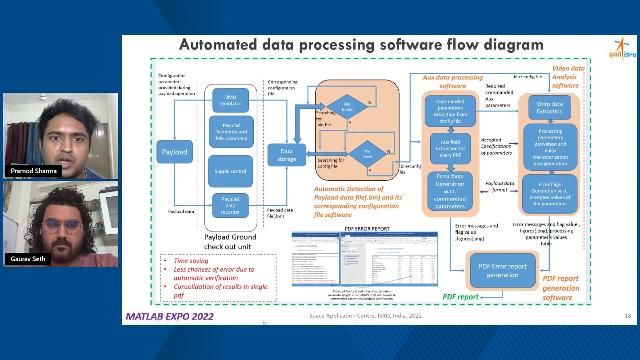
System Design and Automated Error Report Generation Data Processing Software Development
Pramod Sharma, Space Applications Centre, ISRO

5G Vulnerability Analysis with Reinforcement Learning Toolbox
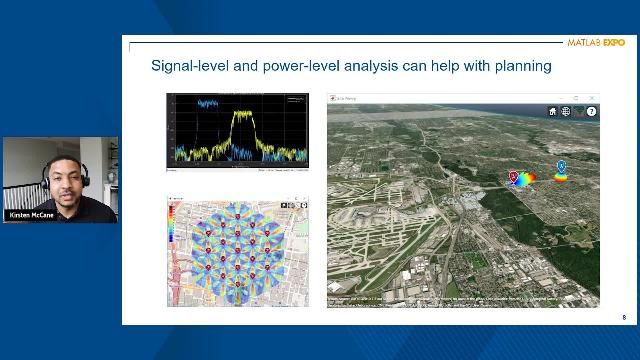
Modeling Radar and Wireless Coexistence
Giorgia Zucchelli, MathWorks
Kirsten McCane, MathWorks

Wireless Standards and AI: Enabling Future Wireless Connectivity
John Wang, MathWorks
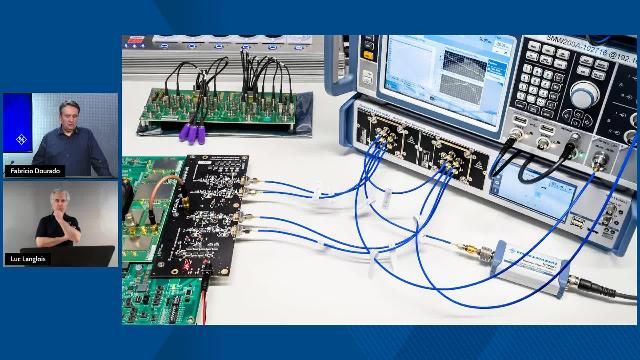
Secure, Automated, Internet-Based mmWave Test and Measurement with Xilinx RFSoC
Fabrício Dourado, Rohde & Schwarz
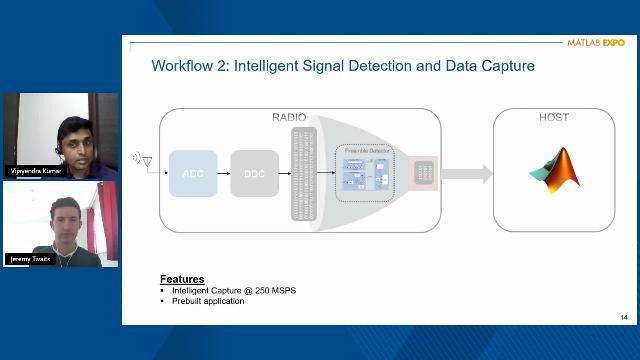
Connecting MATLAB to USRP for Wireless System Design
Jeremy Twaits, NI
AI in Engineering
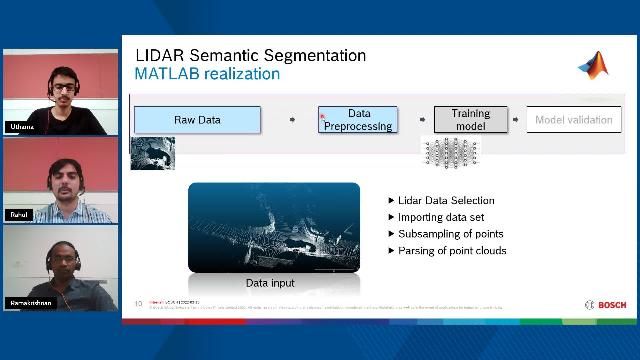
Designing a Lidar Sensor Classifier Using a MATLAB Framework
Porwal Rahul Vikram, Bosch Global Software Technologies Private Limited
Kadengodlu Uthama, Bosch Global Software Technologies Private Limited
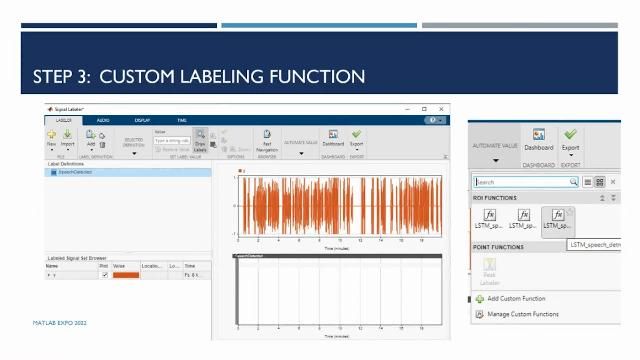
Automating an Audio Labeling Workflow with Deep Learning for Voice Activity Detection
Vasantha Paulraj, Honeywell

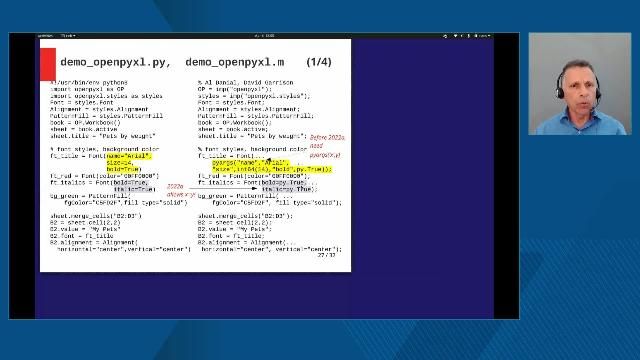
MATLAB with TensorFlow and PyTorch for Deep Learning
Yann Debray, MathWorks
Sivylla Paraskevopoulou, MathWorks

Fitting AI Models for Embedded Deployment
Emelie Andersson, MathWorks

Machine Learning with Simulink and NVIDIA Jetson
Bill Chou, MathWorks
Algorithm Development and Data Analysis
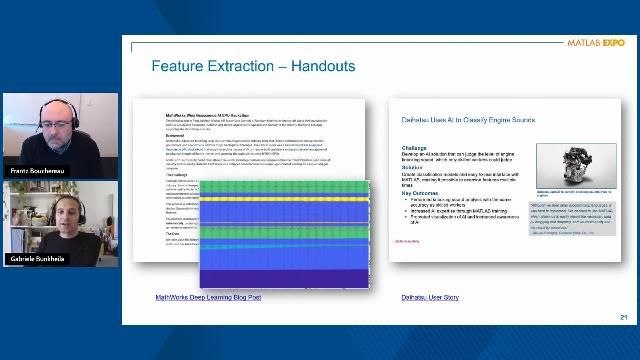
Data-Centric AI for Signal Processing Applications
Frantz Bouchereau, MathWorks
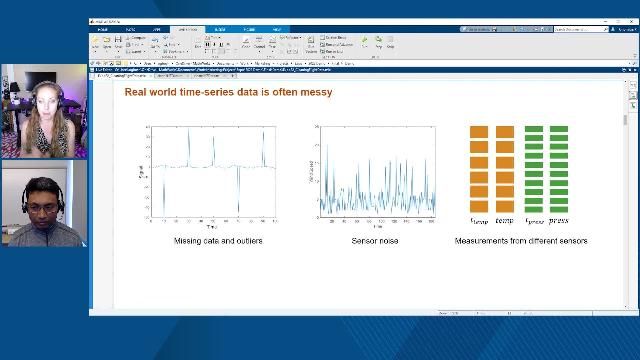
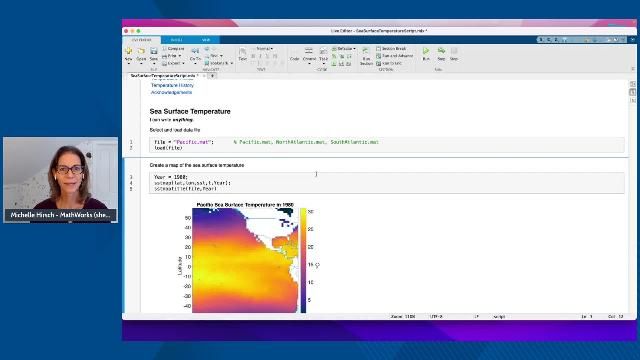
Cleaning and Preparing Time Series Data
Heather Gorr, MathWorks
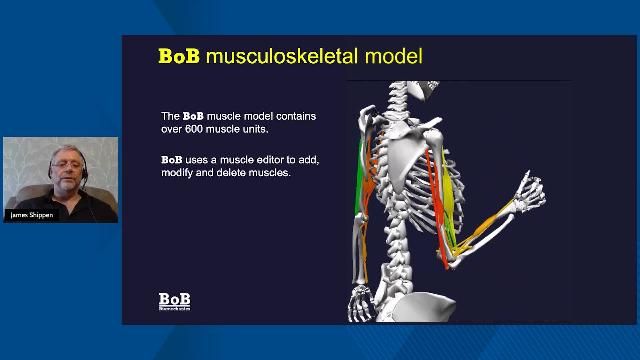
Biomechanical Analysis and Visualization
Autonomous Systems and Robotics
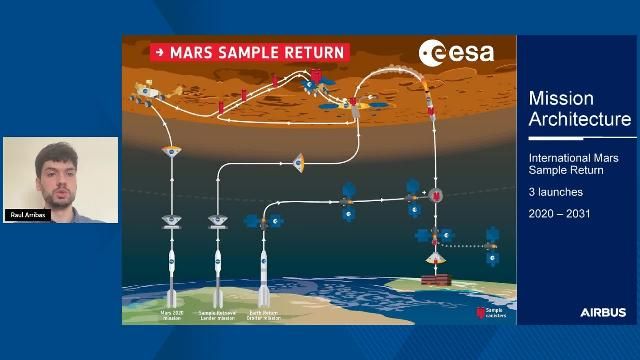
Mars Sample Fetch Rover: Autonomous, Robotic Sample Fetching
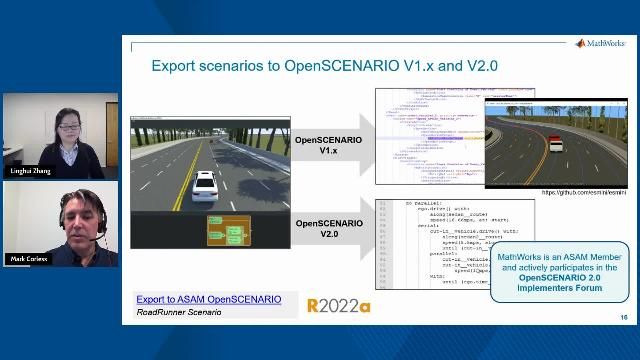
Design and Simulate Scenarios for Automated Driving Applications
Linghui Zhang, MathWorks
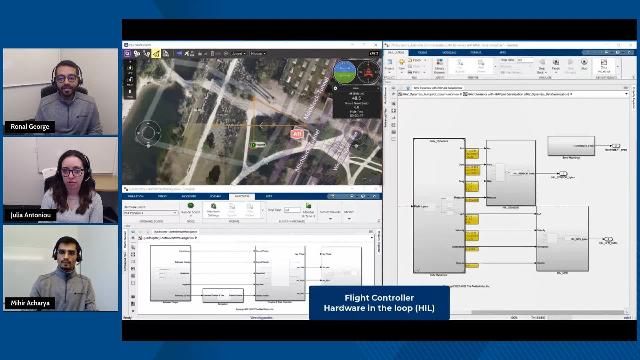
Simulate and Deploy UAV Applications with SIL and HIL Workflows
Ronal George, MathWorks
Julia Antoniou, MathWorks
Electrification, Motor Control, and Power Systems
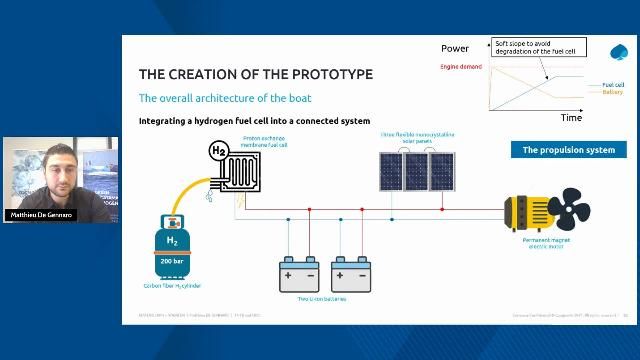
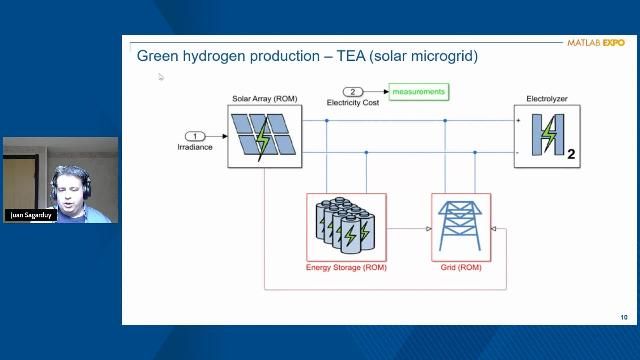
Enabling the Green Hydrogen Supply Chain with MATLAB and Simulink
Vasco Lenzi, MathWorks
Maria Fernandez, MathWorks
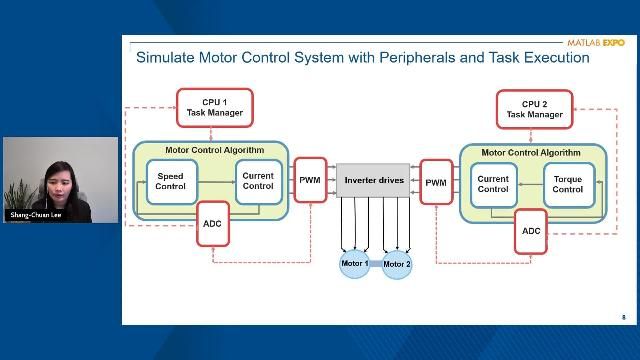
Deploying Motor Control Algorithms to a TI C2000 Dual-Core Microcontroller
Peeyush Kumar, MathWorks
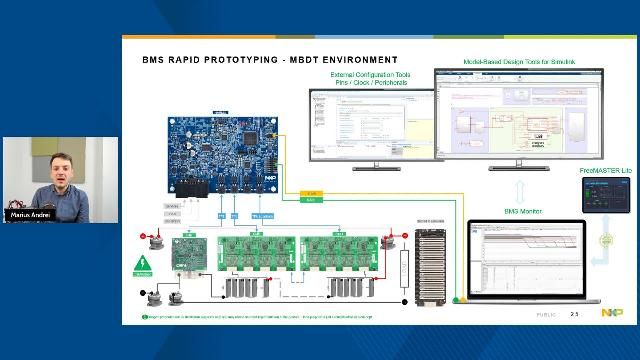
Rapid Prototyping of Embedded Designs Using NXP Model-Based Design Toolbox
Marius Lucian Andrei, NXP Semiconductors
Implementation and DevOps
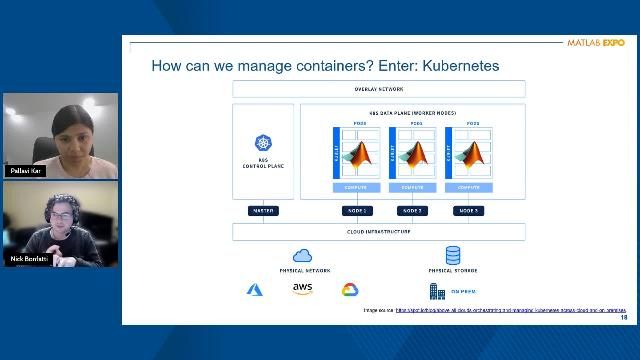
Deploying Cloud-Native MATLAB Algorithms in Kubernetes
Pallavi Kar, MathWorks
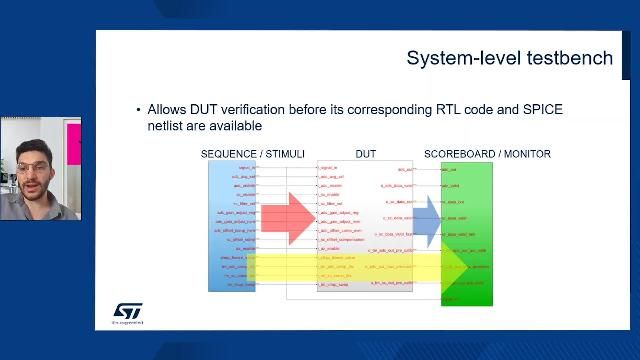
Reuse of Simulink Components Within Chip-Level Design and Verification Environments
Diego Alagna, STMicroelectronics

Automotive DevOps for Model-Based Design with AWS
Haydn Peterswald, Amazon Web Services (AWS)
Modeling and Simulation
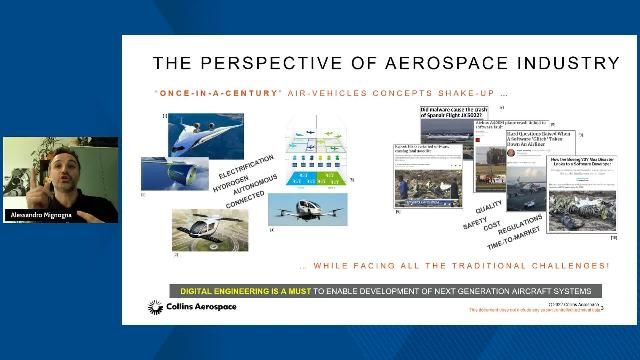
Models Exchange and Virtual Integration with MATLAB and Simulink
Alessandro Mignogna, Collins Aerospace Applied Research and Technology
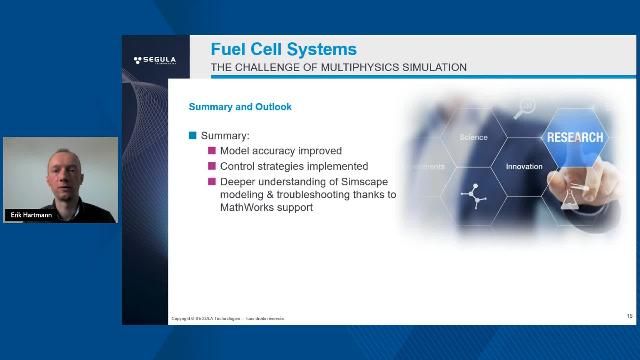
Fuel Cell Systems: A Challenge of Multiphysical Simulations

Using AI to Estimate Battery State of Charge (SoC)
Javier Gazzarri, MathWorks
Preparing Future Engineers
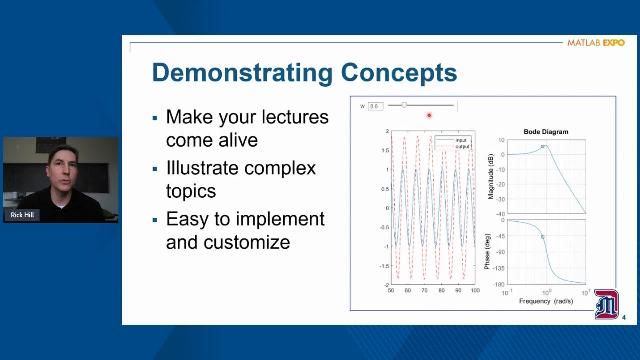
Digital Transformation in Education: Lightning Round
Dr. Rick Hill, University of Detroit Mercy
Dr. Rajakarunakaran S., Ramco Institute of Technology
Dr. Kristopher Ray S. Pamintuan, Mapúa University
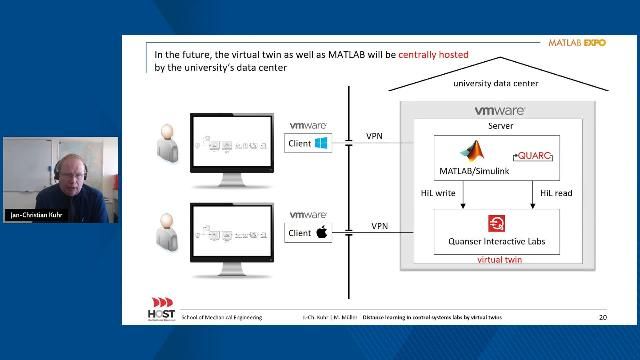
Using Virtual Twins for Distance Learning in Control Systems Labs
Martina Müller, Hochschule Stralsund – University of Applied Sciences

Electrification, AI, and the Future of Engineering Education
Sumit Tandon, MathWorks

Preparing Engineers for the Growing AI Workforce
Maria Elena Gavilán Alfonso, MathWorks
Systems Engineering
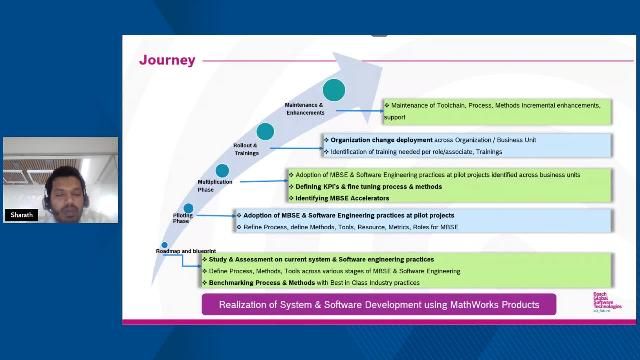
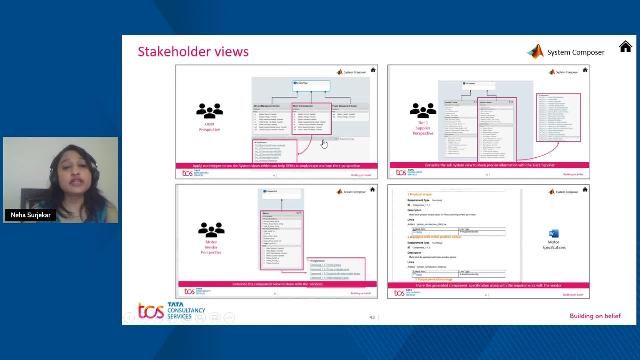
Neha Surjekar, Tata Consultancy Services
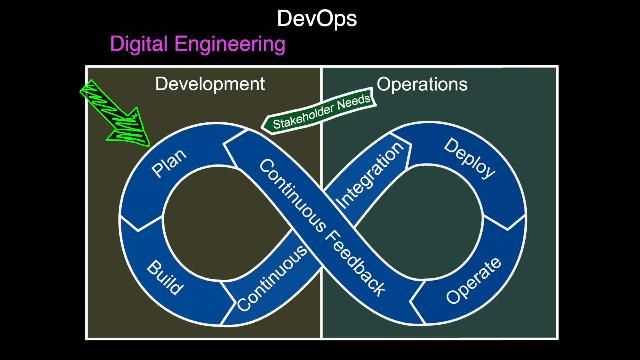
Why Models Are Essential to Digital Engineering
Brian Douglas, MathWorks
Women in Tech

Liz Ashforth, MathWorks
Dr. Angelita Howard, Morehouse School of Medicine
Dr. Yang Yan, Carrier Global Corporation
Tharikaa Ramesh Kumar, Auburn University

Tanya Morton, MathWorks
Claire Lucas, King’s College London
Angelique Janse van Rensburg, BMW
Dr. Babita Jajodia, Indian Institute of Information Technology Guwahati
Dr. Bama Muthuramalingam, QualComm
Mrs. Vaidehi Soman, CIPLA
Ms. Paduka Kannan, TATA Consultancy Services
Dr. Brooke Odle, Hope College
Dr. Feruza Amirkulova, San José State University
Milka Santana, Perfecto Labs
Lael Wentland, Oregon State University