Proceedings
Featured Presentations

General Sessions

Track 1
Track 2
Track 3
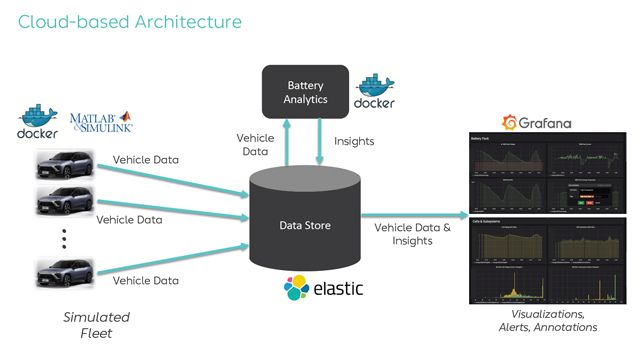
Leveraging MATLAB and Simulink in Building Battery SOH
Matthew Daigle, NIO
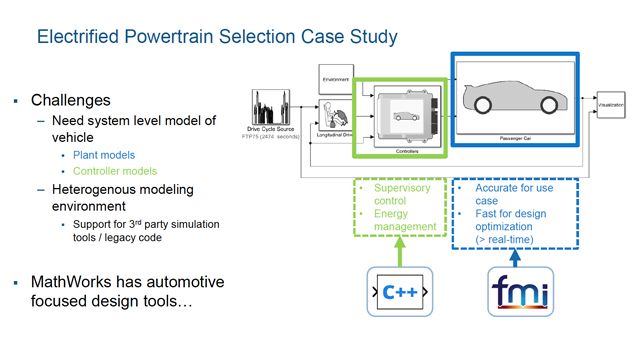
Full Vehicle Simulation for Electrified Powertrain Selection
Kevin Oshiro, MathWorks
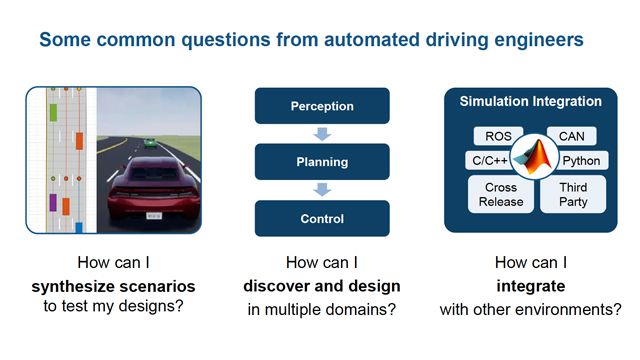
Design and Test of Automated Driving Algorithms
Shusen Zhang, MathWorks
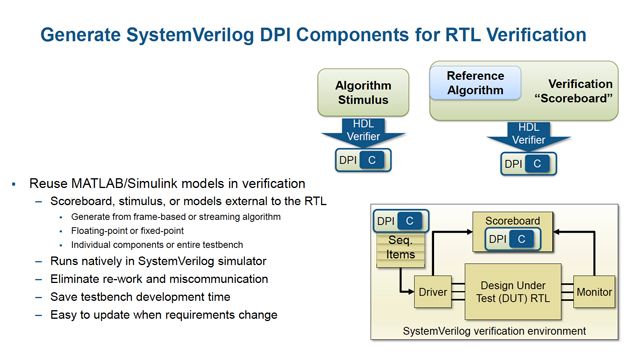
Adopting Model-Based Design for FPGA, ASIC, and SoC
Robert Anderson, MathWorks
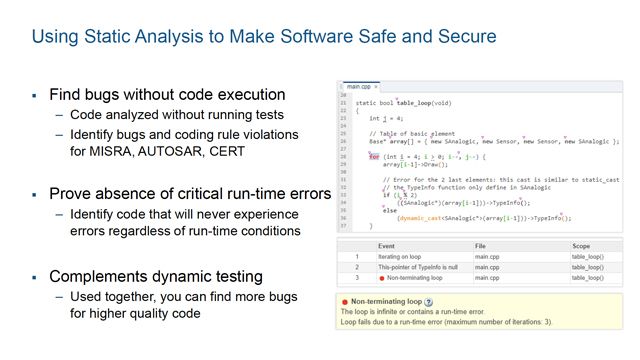
Making Software Safe and Secure with Team Collaboration
Jeff Chapple, MathWorks
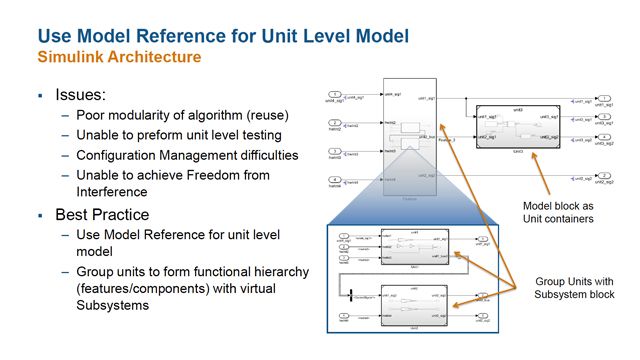
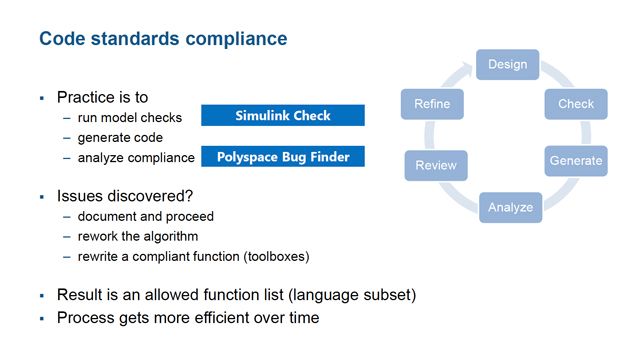
Planning Simulink Model Architecture and Modeling Patterns for ISO 26262 Compliance
David Hoadley, MathWorks
Toolchain Definition and Integration for ISO 26262-Compliant Development
David Hoadley, MathWorks
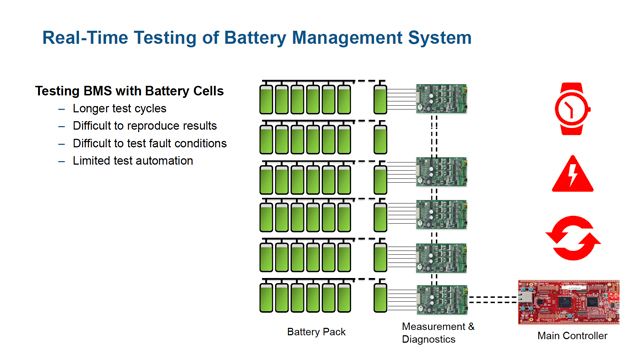
Developing Battery Management Systems Using Simulink
Chirag Patel, MathWorks