講演資料
特別講演のプレゼンテーション


基調講演
グローバルEXPOの基調講演
Save the Earth: 地球科学とすべての電化を加速させる
Dr. Tanya Morton, MathWorks

Heather Gorr, MathWorks
自動運転とADAS開発
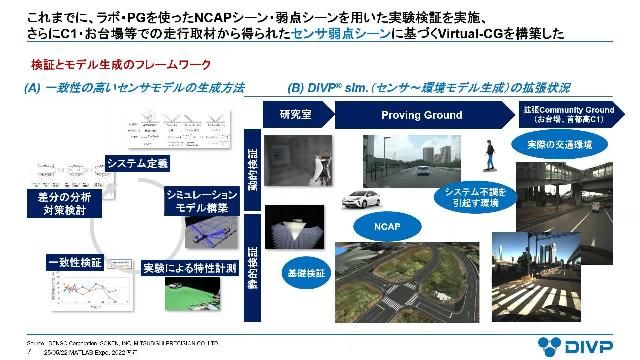

SensorObjectFusion機能向け MILS検証環境の構築
小西 達也, 本田技研工業株式会社
大塚 慶太郎, MathWorks Japan
大塚 慶太郎, MathWorks Japan

大塚 慶太郎, MathWorks Japan
自動運転トラックのためのデータ駆動型制御による横運動制御器自動生成
鈴木 元哉, 株式会社いすゞ中央研究所

ADAS・自動運転開発のためのシナリオ設計とシミュレーション最新機能
町田 和也, MathWorks Japan