Proceedings
Featured Presentations
Keynotes

AI in Engineering
Autonomous Systems

Reinforcement Learning Workflows with MATLAB and Simulink
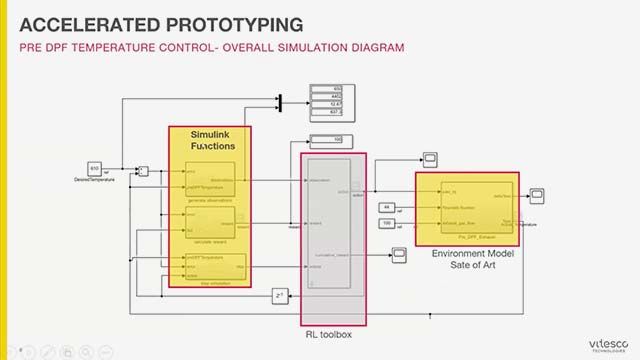
Reinforcement Learning A Motivation for a Powertrain Control Engineer
Electrification


Model-Based Design

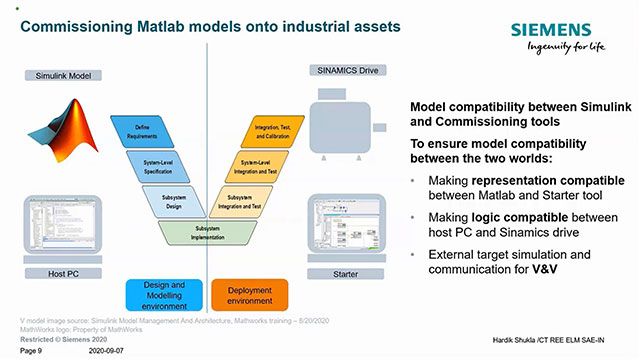
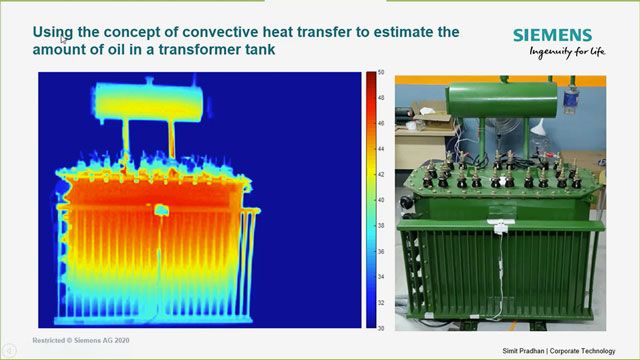
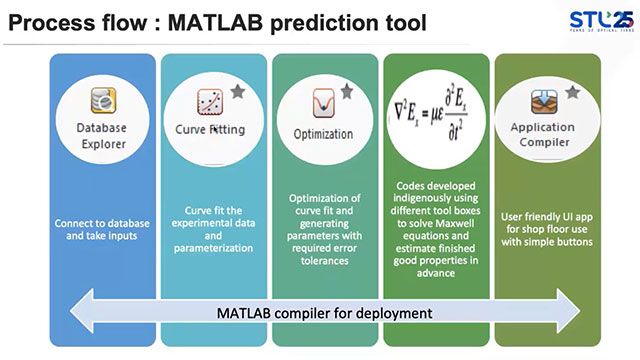
Model-Based Development and Commissioning on Industrial Assets
Hardik Shukla, Siemens
Deploying Deep Learning on Embedded CPUs, GPUs, and FPGAs
Designing deep learning, computer vision, and signal processing applications and deploying them to FPGAs, GPUs, and CPU platforms like Xilinx Zynq™ or NVIDIA® Jetson or ARM® processors is challenging because of resource constraints inherent in embedded devices. This talk walks you through a MATLAB® based deployment workflow that generates C/C++ or CUDA® or VHDL code.
For system designers looking to integrate deep learning into their FPGA-based applications, the talk helps teach the challenges and considerations for deploying to FPGA hardware. We will briefly show how to explore and prototype trained networks on FPGAs using prebuilt bistreams from MATLAB. You can further customize your network to meet your performance requirments and hardware resource usage, generate HDL, and integrate it into an FPGA-based edge inference system.

Dr. Rishu Gupta
MathWorks
Dr. Rishu Gupta is a senior application engineer at MathWorks India. He primarily focuses on image processing, computer vision, and deep learning applications. Rishu has over nine years of experience working on applications related to visual contents. He previously worked as a scientist at LG Soft India in the Research and Development unit. He has published and reviewed papers in multiple peer-reviewed conferences and journals. Rishu holds a bachelor’s degree in electronics and communication engineering from BIET Jhansi, a master’s in visual contents from Dongseo University, South Korea, working on the application of computer vision, and a Ph.D. in electrical engineering from University Technology Petronas, Malaysia with a focus on biomedical image processing for ultrasound images.
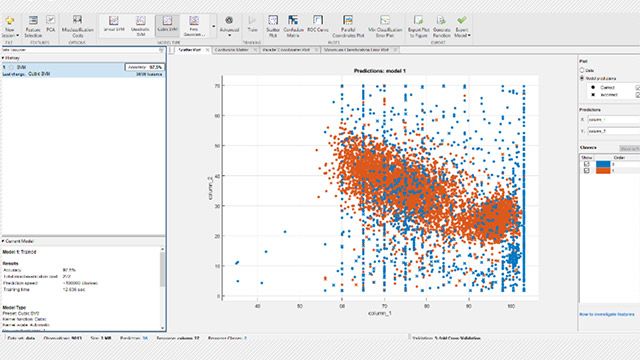
Machine Learning: Proven Applications and New Features
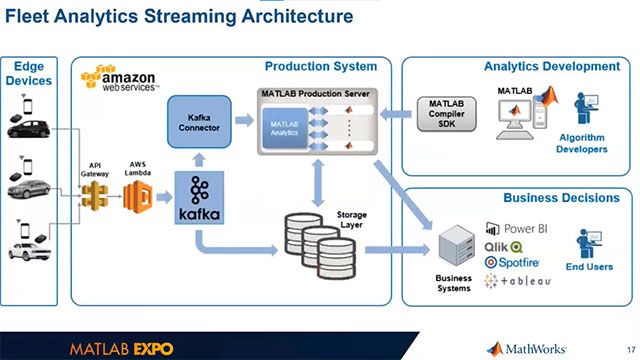
While many organizations get excited about adopting machine learning techniques, success does not come easy. Come to this talk to learn about applications where machine learning generates considerable ROI, including fleet data analysis, energy forecasting, and smart manufacturing. We will also demonstrate how engineers are integrating machine learning techniques with their controls and signal processing workflows to improve system performance.
Throughout the presentation we will highlight new features in MATLAB® that accelerate deploying machine learning. This includes applying automation techniques to feature selection, model selection, and hyperparameter optimization (AutoML). We will also cover new ways for integrating machine learning models with production workflows such as updating deployed models and C/C++ code generation.
Learn how your peers have applied machine learning, and to get inspiration for how machine learning could be applied to your own work.

Dr. Shayoni Dutta
MathWorks
Dr. Shayoni Dutta is a senior application engineer at MathWorks and focuses on technical computing. Her core experience lies in computational biology models and simulation, advanced statistics, machine learning, deep learning, medical imaging, and clinical-trial analytics. Prior to joining MathWorks, Shayoni worked as a data scientist at Bayer, and before that, as an imaging scientist at Sun Pharma Advanced Research Center. She also has served as adjunct faculty for the last six years at National Institute of Forensic Sciences and Criminology under Home Ministry. She has a Ph.D. in computational biology from Indian Institute of Technology, Delhi. She has published and reviewed papers in numerous international conferences and journals.
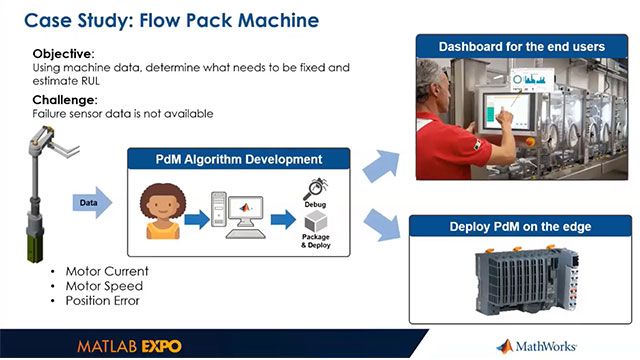
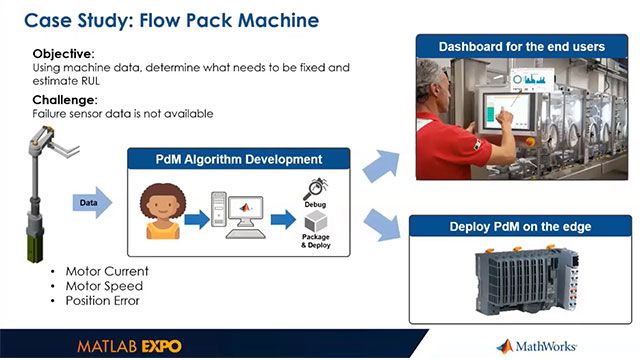
Predictive Maintenance Solutions for Smart Manufacturing
Predictive maintenance reduces operational costs for organizations running and manufacturing expensive equipment, by predicting failures from sensor data. However, identifying and extracting useful information from sensor data is a process that often requires multiple iterations as well as a deep understanding of the machine and its operating conditions.
In this talk, you will learn how MATLAB® and Predictive Maintenance Toolbox™ combine machine learning with traditional model-based and signal processing techniques to create hybrid approaches for predicting and isolating failures. You will also see built-in apps for extracting, visualizing, and ranking features from sensor data without writing any code. These features can then be used as condition indicators for fault classification and remaining useful life (RUL) algorithms.

Amit Doshi
MathWorks
Amit Doshi is a senior application engineer at MathWorks, where he has been promoting MATLAB products for data science. He works closely with customers in the areas of predictive maintenance, digital twin, smart manufacturing, and big data. Amit has over 12 years of experience working across industry. Prior to joining MathWorks, he worked on system simulations, test-setup development, and workflow automation at Suzlon Energy Limited in Pune and Germany, Texas Instruments in Germany, and IIT Bombay. Amit holds a bachelor’s degree in mechanical engineering and a master’s degree in mechatronics.
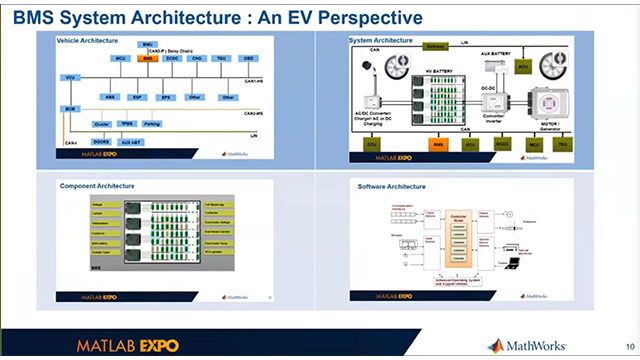
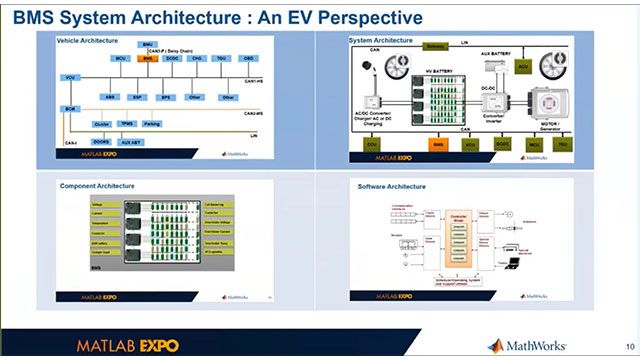
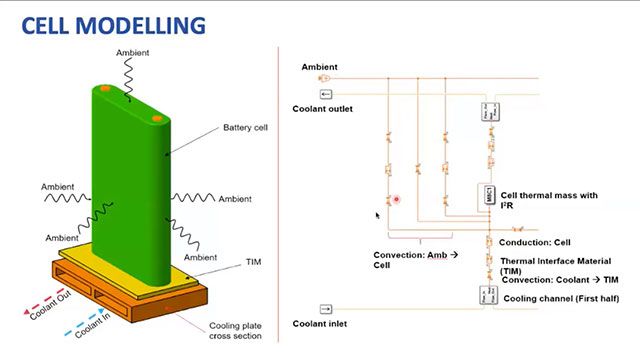
Developing Battery Management Systems Using Simulink
Software algorithms play a critical role in battery management systems (BMS) to ensure maximum performance, safe operation, and optimal life of battery pack under diverse operating and environmental conditions. Developing and testing these algorithms requires expertise in multiple domains and achieving functional safety certification can be very confusing and lengthy process.
In this talk, you will learn how to:
- Design and test BMS algorithms such as state of charge estimation, cell balancing, contactor management, and current/power limit calculation
- Generate production quality C/C++ code and target embedded processors
- Measure design complexity and perform systematic unit testing
- Prove that your design meets requirements and automatically generate tests
- Perform hardware-In-th-loop testing using Speedgoat real-time hardware
- Produce reports and artifacts and certify to functional safety standards

Prashant Hegde
MathWorks
Prashant Hegde is a technical account manager at MathWorks India and specializes in Model-Based Design and development process, verification and validation, code generation for generic embedded platforms, and AUTOSAR. He has expertise in developing the architecture and software for the electric vehicle control systems and battery management systems. Pashant brings more than 15 years of experience from the industry. Prior to joining MathWorks, Prashant worked for Mahindra Electric as deputy general manager for the Model-Based Design department. He also brings experience from Robert Bosch as a technical specialist in the automotive safety and driver information areas and from ADVA Software, Dearborn Electronics, and Delphi Automotive Systems.
Prashant holds a bachelor’s degree in engineering from Visvesvaraya Technological University (VTU) Karnataka, a master’s degree from Birla Institute of Technology (BITS), Pilani, and a management degree from Indian institute of Management Kozhikode (IIMK).
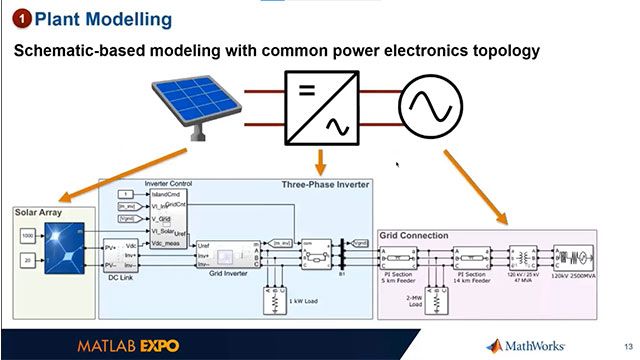
Implementing and Real-Time Testing a Controller for a Grid-Tied Inverter
Grid-tied inverters connect renewable energy sources to an electric utility grid. This session will show you how to model, simulate, and implement a controller for a grid-tied solar inverter using Simulink® and Simscape Electrical™. The demo will use a photovoltaic (PV) inverter to show you how to:
- Build a model to simulate the PV panel, grid load, and grid-tied inverter
- Tune the inverter controller to adjust the DC bus voltage for varying loads
- Develop a maximum power point tracking (MPPT) algorithm to keep the PV system operating at the peak power point under changing solar irradiance, temperature, and load
- Implement plant level control such as fault-ride through, curtailment, and power factor correction
- Generate C code from the controller model and implement it on a Texas Instruments C2000™ microcontroller
- Test the microcontroller code against a real-time hardware-in-the-loop (HIL) simulation of the PV system and inverter using a Speedgoat real-time system

Rahul Choudhary
MathWorks
Rahul Choudhary is an application engineer with MathWorks India and specializes in the field of plant modeling and control system design. He has over seven years of experience in the area of control system design, plant modeling, prognostics, and health monitoring. Prior to joining MathWorks, Rahul worked with Eaton India Engineering Centre as a control engineer involved in developing prognostics and health monitoring algorithms for proof-of-concept projects using MATLAB® and Simulink®. He holds a master’s degree in systems and control engineering from Indian Institute of Technology Bombay, Mumbai and a bachelor’s degree in electronics and instrumentation engineering from Institute of Engineering and Technology, Lucknow, India.
Spinning Brushless Motors with Simulink
Brushless motors are everywhere. These motors rely on field-oriented control to regulate currents to motor windings. In this session, we will look at some of the challenges and solutions for developing field-oriented control algorithms to achieve the 10-20KHz switching frequency required for efficient and accurate motor operation.
Highlights:
- Approaches for automatically generating fast compact floating-point and fixed-point code from models
- Methods for developing sensorless field-oriented control algorithms
- Approaches for tuning speed and current loop gains
- Techniques to model and parameterize electrical machines for simulation work

Nukul Sehgal
MathWorks
Nukul is an application engineer at MathWorks India. He regularly interacts with customers to help them integrate code generation, verification, and validation tools into their production process. He has over seven years of experience in the embedded systems and automotive industry. Before joining MathWorks, Nukul has worked as a lead engineer in R&D at Interface Microsystems, Gurugram. He has worked on ECU design, software development, and functional testing. He is hands-on on industry standards like ASPICE and ISO 26262. Nukul holds a bachelor’s degree in electronics and communication engineering.
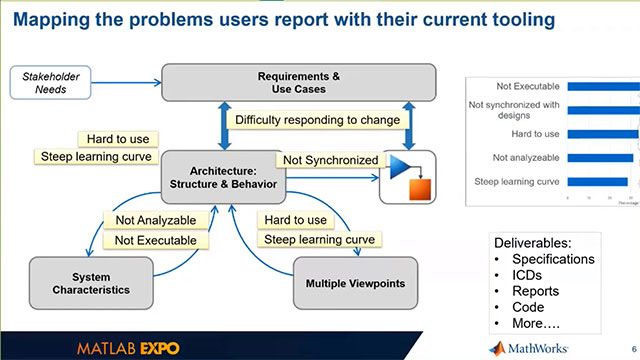
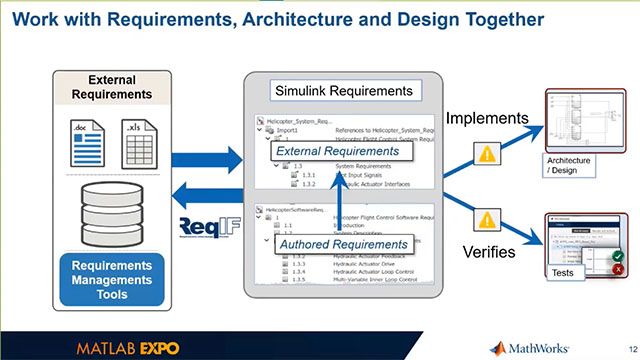
Bridging the Gap Between Systems Engineers' Architecture Models and Model-Based Design
Systems engineering is a challenging problem, and often the tools used to tackle these challenges do not connect well to the other tools used throughout the design process. MathWorks systems engineering tools combine with MATLAB® and Simulink® to create a unified modeling environment, enabling the use of a single platform throughout systems engineering, design, implementation, and verification processes.
In this talk, we present a workflow for systems engineering and architectural modeling with a tight connection to Model-Based Design.
Highlights:
- Building a bridge between early architecture work and downstream design
- Creating architecture models and extending the language through stereotypes and profiles
- Analyzing architectures
- Moving to design and implementation

Gaurav Dubey
MathWorks
Gaurav Dubey is a principle pilot engineer in MathWorks India and specializes in the fields of model-based development workflows, automatic code generation, verification and validation, model-based systems engineering, and certifications. He works closely with customers across industries to help them use MATLAB® and Simulink® products for model-based development, production code generation, and software verification and validation. Gaurav brings more than 16 years of experience in embedded system development for automotive and aerospace applications. Prior to joining MathWorks, Gaurav worked with Tata Motors Limited, where he gained hands-on experience in engine management system ECU development. He has also worked as a software analyst at Tata Consultancy Services on automotive projects involving model-based development. Gaurav holds a master’s degree in instrumentation engineering, and a master’s degree in electronics and communications.
Share Simulink Simulations as Standalone Applications, Web Apps, and Enterprise Applications
As simulation becomes increasingly important across an organization, engineering teams need to share their Simulink® simulations with adjacent groups, suppliers, and clients.
In this presentation, you will see how to share Simulink simulations as standalone executables and browser-based web apps that can be accessed with unique URLs. In addition, you will see how to deploy your simulations on MATLAB Production Server™ as APIs that can be called from enterprise applications.

Dr. Sunil Unnikrishnan
MathWorks
Sunil is a principal technical consultant with MathWorks India. Sunil brings 19 years of experience from the energy sector. Prior to joining MathWorks, Sunil worked with the GE Power division and Nuclear Power Corporation. Sunil’s career is primaly associated with plant modeling, estimation, controls and optimization. Sunil holds a Ph.D. from IIT Bombay with systems and control engineering as specialization.
Reinforcement Learning Workflows with MATLAB and Simulink
Reinforcement learning allows you to solve control problems using deep learning but without using labeled data. Instead, learning occurs through multiple simulations of the system of interest. This simulation data is used to train a policy represented by a deep neural network that would then replace a traditional controller or decision-making system.
In this session, you will learn how to apply reinforcement learning using MATLAB® and Simulink® products, including how to set up environment models, define the policy structure, and scale training through parallel computing to improve performance.

Naga Chakrapani Pemmaraju
MathWorks
Naga is a senior application engineer with MathWorks India and specializes in the areas of modeling, simulation, controls, and real-time simulations. He works closely with customers in the automotive industry, defense labs, and other top tier education institutes in helping them adopt Model-Based Design using MATLAB® and Simulink®. Naga has over 12 years of experience working in controls for the automotive, aerospace, and renewable energy domains. Prior to joining MathWorks, Naga worked on controls for wind turbines at Vestas Wind System, on auto-code generation for Converter Controls at Northern Power Systems, and on hardware-in-the-loop (HIL) simulations at Caterpillar Inc.
Naga holds a bachelor’s degree in electronics and control engineering from JNTU, Hyderabad and a master’s degree in electrical engineering from Texas A&M University, Kingsville-USA.
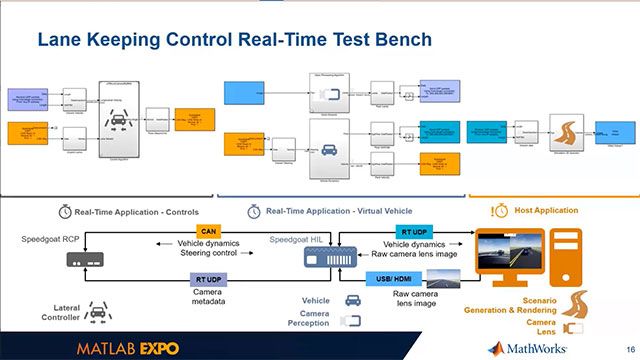
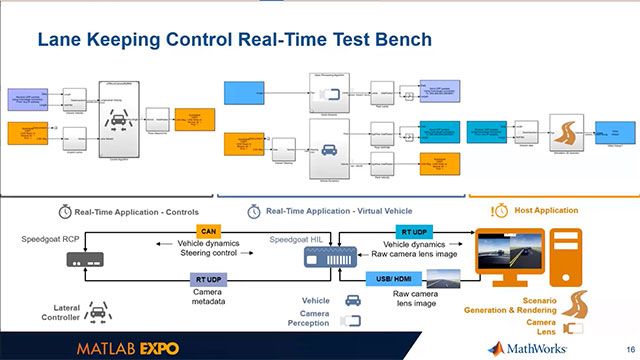
Real-Time Prototyping and Testing for ADAS: Lane Keeping and Following Assist Systems
Lane keeping assist (LKA) and lane following assist (LFA) systems are an important feature of advanced driver assistance systems (ADAS) and automated driving (AD). They automatically take action to keep the vehicle in its lane and follow cars at a safe distance. Variations in road and driving conditions must be considered when designing reliable and robust LKA and LFA systems.
Real-time simulation and testing can help verify these systems with simulated driving. We will discuss how to simulate road and other conditions using a photorealistic simulation environment leveraging the Unreal Engine from within Simulink®. Using a multicore Speedgoat system, we simulate the vehicle dynamics and powertrain as well as lane keeping and following with model predictive controls. The vision-based lane detection algorithm is implemented on a Simulink programmable FPGA I/O module from Speedgoat, making it possible to process video data from the Unreal Engine.

Abhisek Roy
MathWorks
Abhisek Roy is an application engineer at MathWorks India focusing on control design and automation. He has been working with customers to address their challenges in the areas of physical modeling and robotics. His areas of interest include the study of controls systems, physical modeling, and robotics. Abhisek has completed his M.Tech in electrical engineering from Indian Institute of Technology, Madras, specializing in the area of control systems and robotics, and B.Tech in electrical engineering from Jadavpur University, Kolkata.
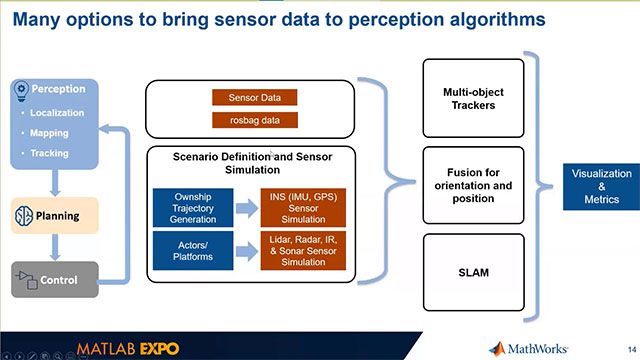
Sensor Fusion and Navigation for Autonomous Systems
In order for autonomous systems to move within their environment, engineers need to design, simulate, test, and deploy algorithms that perceive the environment, keep track of moving objects, and plan a course of movement for the system itself. This workflow is critical for a wide range of systems including self-driving cars, warehouse robots, and unmanned aerial vehicles (UAVs). In this talk, you will learn how to use MATLAB® and Simulink® to develop perception, sensor fusion, localization, multi-object tracking, and motion planning algorithms. Some of the topics that will be covered include:
- Perception algorithm design using deep learning
- Fusing sensor data (cameras, lidar, and radar) to maintain situational awareness
- Mapping the environment and localizing the vehicle using SLAM algorithms
- Path planning with obstacle avoidance
- Path following and control design

Abhishek Tiwari
MathWorks
Abhishek Tiwari is a senior pilot engineer at MathWorks India specializing in design analysis and implementation of signal processing, communications, and data processing applications. He works closely with customers across domains to help them use MATLAB® and Simulink® in their workflows. He has over nine years of industrial experience in the design and development of hardware and software applications in the radar domain. He has been a part of the complete lifecycle of projects pertaining to aerospace and defense applications. Prior to joining MathWorks, he worked for Bharat Electronics Limited (BEL) and Electronics and Radar Development Establishment (LRDE) as a deputy manager. He holds a bachelor’s degree in electronics and telecommunication from National Institute of Technology, Raipur.
What’s New in MATLAB and Simulink
Learn about new capabilities in the MATLAB® and Simulink® product families to support your research, design, and development workflows. This talk highlights features for deep learning, wireless communications, automated driving, and other application areas. You will see new tools for preprocessing and analyzing data; developing motor control algorithms; creating interactive apps; packaging and sharing simulations; and modeling, simulating, and verifying designs.

Prashant Rao
MathWorks
Prashant Rao is a senior technical manager at MathWorks India and leads a team of customer-facing engineers encompassing the application engineering and pilot engineering roles. By applying industry and application expertise across numerous domains, Prashant and his team work with customers to enable the adoption of MATLAB® and Simulink® products for technical computing and Model-Based Design. Prashant has over 19 years of experience in application engineering and hardware design engineering roles. Prashant joined MathWorks in Germany in 2005 and worked with customers in the signal processing, communications, HDL code generation, and HDL verification domains before moving to India in 2009 to lead the MathWorks India application engineering team. Prior to joining MathWorks, Prashant worked at two semiconductor IP startup companies: Starcore LLC and PACT XPP Technologies AG. He has a master’s equivalent degree (Dipl.-Ing.) in microelectronics from the Technical University of Hamburg-Harburg (TUHH), Germany.
Pragmatic Digital Transformation
Organizations with digital transformation initiatives are making the transition from visionary ambitions to practical projects. These organizations have defined their high-level digital transformation objectives, and are now looking to their engineers and scientists to achieve them by learning new technologies, collaborating with unfamiliar groups, and proposing new products and services.
To meet this challenge, technical organizations must master how to systematically use data and models, not only during the research and development stages, but also across groups throughout the lifecycle of the offering. An effective digital transformation plan needs to consider changes in people’s skills, processes, and technology.
Join us as Jim Tung describes this pragmatic approach to digital transformation and demonstrates how engineering and scientific teams are leveraging data and models to achieve their transformative objectives.

Jim Tung
MathWorks
Jim Tung has more than 30 years of experience in the technical computing software markets. He is a 25-year veteran of MathWorks, holding the positions of vice president of marketing and vice president of business development before assuming his current role focusing on business and technology strategy and analysis. Jim previously held marketing and sales management positions at Lotus Development and Keithley DAS, a pioneering manufacturer of PC-based data acquisition systems. Jim holds a bachelor's degree from Harvard University.
Automated Requirements-Based Testing
Applying verification and validation techniques early in the development process enables you to find design errors before they can derail your project. Most system design errors are introduced in the original specification but are not found until the test phase. When engineering teams use models to perform virtual requirement based testing early in a project, they eliminate problems and reduce development time.
In this master class, you will learn how you can apply early verification and validation activities at every stage of the development process to ensure that your design meets the functional requirements and is free from any design errors.
Highlights include:
- Detecting design errors in models using formal verification methods
- Systematic simulation testing of design by using an automation framework
- Automatically generating reusable tests that satisfy model and code coverage
- Formally validate safety-critical properties and verify design robustness.

Gaurav Ahuja
MathWorks
Gaurav Ahuja is an application engineer at MathWorks India and works with customers on the adoption of the MATLAB® and Simulink® products in the areas of model verification and validation, production C code generation, and certification. Before joining the Application Engineering team, Gaurav worked in the HDL Coder™ development team on support for Microsemi’s family of FPGA boards and collaborated with sales teams on automatic C and HDL code generation. Gaurav has a bachelor’s degree in electronics and communication engineering and a master’s degree in embedded systems from BITS, Pilani.